Let's Go Pic!!!
Cap.19.

Alimentatore per servo motori e Micro-GT mini
Autore Marco Visentini con la supervisione e introduzione di Marco Gottardo as "ad.noctis"
5 SETTEMBRE 2011
Spesso chi
propone driver per servomotori, puntando alla compattezza e alla buona
estetica, trascura una cosa ovvia e fondamentale ! I servo motori per quanto
miniaturizzati sono sempre e comunque degli attuatori di potenza ovvero dei
convertitori energetici, e dato che come è noto l'energia non si crea dal
niente o non si distrugge, ma cambia solo forma, o la forniamo alla fonte o
avremo risultati deludenti da tutto il sistema.
Ecco la necessità di progettare un alimentatore ad hoc che sopperisca tutte le necessità, anche impulsive di potenza/energia da parte dei molti attuatori connessi anche a una scheda così piccola come la Micro-GT mini.
Come per il cap.14 anche questo cap.19 del Tutorial "Let's GO PIC!!!" viene delegato a questo mio ex allievo che si è dimostrato in più occasioni un ottimo tecnico.
introduzione a cura di ad.noctis
Integrato L296
Si tratta di un famoso regolatore switching prodotto dalla SGS-Thompson su contenitore plastico Multiwatt a 15 pin, il cui aspetto è visibile in figura.
Il circuito integrato contine anche una sezione PWM che in configurazioni diverse da qeulla proposta può ance pilotare motori in continua di piccola e media potenza. Questa sezione PWM è pilotata da un oscillatore in grado di generare frequenze di controllo fino a 200Khz. La sezione di potenza, stando ai databook è in grado di fornire al carico fino a 4A con uscita variabile da 5,1 fino a 40 volt (tensione in input permettendo). Con particolari accorgimenti circuitali, e se si dovesse rendere necessario è possibile fare scendere la tensione minima di uscita sotto i 5,1 volt.
Bisogna fare attenzione a non superare in ingresso la tensione di 46 volt livellati al fine di non danneggiare il dispositivo.
Nella prossima immagine abbiamo il pinout ovvero la conessione interna dei reofori. Viene messo in evidenza che l'aletta di raffreddamendo, e quindi anche il dissipatore (se non ci si isola con le apposite miche o piastrine termiche) riulterà conesso alla massa elettrica.
La casa costruttrice SGS-Thompson, mette a disposizione nei databook la sottostante tabella chiarificatrice per la funzione di ogni singolo pin.
Schema elettrico
L'alimentatore
è stato sviluppato come variante di numerosi prototipi creati in precedenza con
la variazione circuitale di essere progettato con stadio di ingresso con
raddrizzatore a ponte permettendo così l'uso di trasformatori privi della presa
centrale all'avvolgimento secondario.
Rispetto ai prototipi lo schema finale mostra qualche allegerimento circuitale, notiamo infatti la presenza di un unico condensatore elettrolitico nello stadio di ingresso come anche un unico in quello di uscita. Il circuito è in grado di fornire una potenza notevole, fino a 4A con una regolazione della tensione da 5,1V fino a praticamente 40V, ma questo valore sarà raggiungibile solo se il ponte di diodi risulta alimentato con il secondario di un trasformatore dl valore di:
Vac = 40 /1,41
da cui risulta un secondario a Vac= 28 V (Volt alternati sinusoidali)
In caso non avessimo un trasformatore di questo tipo a disposizione è sempre possibile ponticellare, ponendoli in serie, i due avvolgimenti secondari da 15+15 oppure, per maggiore margine di sicurezza, 12+12 che avendo come somma 24Volt non consentiranno all'alimentatore di raggiungere il valore massimo di 40VDC.
Difatti, anche trascurando la caduta di dropout del dispositivo avremo disponibili al condensatore di livellamento, ovvero al pin 3 dell'integrato, una tensione pari a:
Vdc=Vac x 1,41 = 33,9 Vdc
La notazione che ho usato è per hobbysti e per "meccanici" che per ragioni proprie hanno bisogno di formulette veloci e intuitive. Per tranquillizzare gli esperti diciamo subito che con Vac indico il valore letto sul tester quando lo strumento è commutato in alternata (per gli esperti valore efficace della sinusoide) e con Vdc indico invece la tensione non solo raddrizzata (perchè all'uscita del ponte si avrebbe una pulsante a 100Hz) ma anche livellata dal condensatore elettrolitico nelo schema indicato con C2. ovviamnte con il valore 1,41 indico la radice quadrata di due che è il rapporto esistente tra il valore di picco e il valore efficace di una sinusoide.
Capito questo ragionamento possiamo intuire che se vogliamo alimentare solo la Micro-Gt mini e i suoi 14 servomotori ci può bastare un trasformatore con singolo secondario a 12Vac, in questo caso otteniamo una regolazione possibile compresa tra 5,1 e circa 15Vdc.
Vout = 12 x 1,41 =16,97 (trascurando le cadute interne)
in realtà avrò effettivi in uscita circa 15Vdc
Supponiamo che un utente non voglia dare altra destinazione a questo alimentatore che energizzare in maniera forte e stabile i 14 servomotori. Abbiamo bisogno di una tensione fissa, impostata tramite il corretto calcolo del partitore resistivo in uscita R4 e R2, ad un valore compreso tra 4,5 e 6,5, per servo standard, anche se alcuni, con chiara indicazione sulla targhetta, sono alimentabili a 7 o addirittura a 9.
Considerimao la tensione standard di 5,5 volt (valore centrale sempre accettato), il trasformatore potra avere un secondario anche di soli 5Vac. Per essere sicuri di ben compensare le eventuali cadute un trasformatore a 8Vac sarà ottimale.
E' intuitivo che il secondario di questo trasformatore dovrà essere collegato ai morsetti X1-1 e X1-2 del circuito anche senza preocupparsi della fase.
Calcolo del condensatore di livellamento
Come in precedenza accennato all'uscita del ponte abbiamo la capacita C2 di tipo elettrolitico il cui valore (pur non essendo molto critico) andrebbe calcolato e non lasciato al caso.
Questo condensatore deve avere una tensione di lavoro maggiorata risptto a quello a cui lavora il circuito (o della maglia in cui è inserito) di almeno il 25%, in sostanza i VL dipenderanno dal secondario del trasformatore a cui ci andremo a collegare, esempio Vac=8 quindi VL= 10Volt, se invece il secondario del trasformatore è pari a 24Vac allora la capacità C2 avrà un valore di lavoro pari a:
[(24/100)*25]+24=30VL
Attenzione perchè questo puro valore "30" sarebbe critico dato che è evidente che in quel punto del circuito ci sono 33V e non 30, fortunatamente ci vengono incontro i valori standard che ci imporranno di comprare un condensatore di almeno 35VL. In caso di dubbi arrotondate la percentuale da 25% (come consigliato in alcuni vecchi testi scolastici) a un più salutare 30%.
Per quanto riguarda la capacità del condensatore di livellamento viene calcolata con la seguente formula:
Cx = k* (I/VR)
in cui si ha:
- Cx = capacità in microfarad del condensatore di livellamento
- I = corrente in milliampere che deve erogare l'alimentatore
- VR =massimo valore del ripple ammesso sovrapposto alla tensione continua
- K = costante della formula che vale 4,8 nei raddrizzatori a una semionda e 1,8 in quelli ad onda intera o ponte di graetz
Supponiamo che il massimo ripple che vogliamo ammettere, con una corrente prelevata di 1 ampere, valga 0,5 volt (siamo prima del regolatore stabilizzatore). La capacita C2 potrà valere:
0,5=1,8*1000/Cx
da cui, mettendo in evidenza Cx nell'equazione, si ottiene:
Cx= (1,8*1000)/0,5
Cx=3600 uF
circa il valore indica nello schema.
Poniamoci adesso nelle condizioni più critiche di funzionamento in cui si pretendo all'uscita tutti i 4A (ovvero 4000 mA) che il circuito integrato può fornire, e contemporaneamnte si vuola ammettere un ripple mazzimo di 1Volt all'entrata del regolatore. La medesima formula mi restituisce il nuovo valore che dovremo montare nei fori delò PCB predisposti ad alloggiare C2.
Cx= (1,8*4000)/1
da cui ricavo il valore, notevolmente maggiore:
Cx=7200uF
Fermi restondo i volt lavoro che coem accennato prima dovranno maggiorare del 25% (ma io consiglio 30%) il valore efficace della tensione letta sul display del tester sui morsetti del trasformatore privo del carico capacitivo.
.
Altri dimensionamenti da eseguire per customizzare il circuito
Vi sono altri due punti dello schema che richiedono un intervento di dimensionamento, il punto di regolazione resistiva tramite partitore e il punto di reazione induttiva costituito dall'induttanza da 330uH.
Supponiamo di essere interessati a una regolazione compresa tra 5,1 e 15V, quindi la serie del potenziomentro da 5K (oppure 4k7 se è un valore più ovvio), con la resistenza da 2k2 è corretta, ma nel caso si volesse realizzare la versione a tensione fissa si può sostituire il groppo con una serie di R fisse dimensionate come in tabella:
Per quanto riguarda il dimensionamento dell'induttanza posta in serie all'uscita procedete secondo la tabella riportata che utilizza sezioni di filo di rame standard e core toroidali metallici di serie. Seguendo queste indicazioni otterete il valore di 300uH richiesti dal progetto.
Nota dell'ing. Gottardo Il valore di questa induttanza è meno critico di quello che sembra per il corretto funzionamento del circuito, quindi non abbiate timore a recuperare un toro da un vecchio alimentatore ATX bruciato, e dopo esservi procurati del filo similare, ovviamnte smaltato, a quello sopra indicato avvolgete manualmente la vostra bobina. Il circuito funzionerà di sicuro. Personalmente mi ha funzionanto anche recuperando il rame dalla bobina di un vecchio teleruttore che si era rotto meccanicamente.
Assorbimento tipico dei servomotori
Prendiamo come esempio un servomotore tipico molto diffuso prodotto dalla Futaba, (ad esempio il modello Futaba 3003), come specificato dalla costruttrice, arriva ad assorbire nelle condizioni di sforzo tipiche 180mA. Ora dobbaimo pensare che alla Micro-Gt mini ne vengono collegati 14, quindi si ha un assorbimento massimo pari a:
Imax = 180*10^(-3) * 14 = 2,52 A
Questa è una corrente di tutto rispetto e non di certo ricavabile da un regolatore di tensione della serie LM78xx. Da questo calcolo è nata l'esigenza di costruire il circuito qui presentato.
Come vediamo dalla prossima immagine, già presentata in un precedente capitolo di "Let's GO PIC !!!" osserviamo che l'alimentazione per la logica è in un canale bene separato da quello della potenza.
Osservando il PCb si nota che tutti i pin centrali sono interconessi tra loro e al filo rosso di ogni servomotore che andremo a conettere alla Micro-GT mini, mentre tutti quelli più lontani dal pic (quelli più in basso sono collegati alla massa, quindi si ha una sorta di protezione dall'inversione di inserimento dato che la tensione positiva si trova sempre in posizione centrale).
Il filo nella foto indicato in bianco potrà essere, in funzione del modello e della casa costruttrice, blu o giallo, ma in ogni caso indica il terminale in cui si deve portare il segnale rettangolare che rappresenta il comando di posizionamento del servomotore.
Il lato del filo bianco è quello che si trova più vicino al microcontrollore nel layout della Micro-Gt mini..
Ricordiamo brevemente che il servo andrà pilotato con un segnale monostabile, ripetuto circca 50 o 60 volte al secondo, il cui duty cycle non sarà misurato in percentuale come avviene con un normale PWM, ma in millisecondi.
Tipicamente tenedo l'uscita del PIC attiva per un tempo compreso tra 1,5 e 2,5 ms si ottiene l'escursione dal minimo al massimo dell'angolo dell'asse del servomotore.
Dato che questo segnale ha molte affinità con un PWM con frequanza 50Hz, in molti casi l'applicazione di questo risulterà funzionante per il servomotore.
In ogni cosa, se il filo di comando (azzurro o bianco o giallo) non riceve un refresch entro 200 ms il motore si spegne per riaccendersi quando la situazione di comando si riporta alla normalità.
E' evidente che il morsetto X4-1 della Micro-Gt mini va collegato al morsetto X2-1 dell'alimentatore, mentre il morsetto X4-2 della Micro-GT (massa) va collegato al morsetto X2-2 dell'alimentatore (massa).
Dato che la Micro-Gt mini ha presente un regolatore di tensione LM7805, che notoriamente causa una caduta dovuta al dropout di circa 2 volt, bisognerà alimentare il morsetto X2-1 con un positivo ad almeno 7volt e il morsetto X2-2 con la massa di questo secondo alimentatore. Le due masse saranno poi internamente collegate.
Si consiglia per funzionamento "gravoso" di tenere seperate queste due alimentazioni usando due schede del progetto qui presentato così da poter effettuare una efficace separata regolazione per entrambi i canali che come detto uno sarà a 7 e uno a 5,5 volt.
ovviamente, per quei temerari che non temono le istabilità delle alimentazioni, e che hanno un trasformatore sufficentemente robusto allora potremmo tenere un unico alimentatore, regolato ad esempio a 5,1V.
In questo caso il trasformatore potrà avere un secondario unico a 5Vac dato che dopo avere raddrizzato e livellato si ha:
5Vac x 1,41 = 7,07 V
Che sono comunque appena sufficenti all'accensione coretta del regolatore, ne consegue che un secondario di almeno 6 volt sarebbe più opportuno.
Supponiamo di disporre di un trasformatore con secoundari a 8Vac, dato che il parametro di dimensionamento è la Vn, e la Pn allora dovremmo istallare almeno un 8 x 2,5 = 20VA
Teniamo presente che l'assorbimento della scheda di controllo benchè trascurato non è nullo, ma comunque molto inferiore a quello dei servomotori, quindi non sarà strettamente necessario sovradimensionare il trasformatore a 25 VA che comincia ad essere un po ingombrante.
Layout della scheda.
Dopo lo sbroglio della scheda il PCB risulta molto compatto, solo 7cm per 4,5cm.
Il ponte di diodi montato è leggermente sovradimensionato dato che porta 6A contro i 4 del circuito integrato in questione. L'aspetto si presenta nolto pulito e ordinato.
Sul lato di sinistra possiamo vedere le piazzole in cui si potrà fissare indifferentemente il trimmer da un giro, se vogliomo fare una regolazione fissa come nel nostro caso, oppure un potenziometro se volessimo usare l'alimentatore come strumento da laboratorio.
Vediamo ora il PCB dopo lo sbroglio in Eagle.
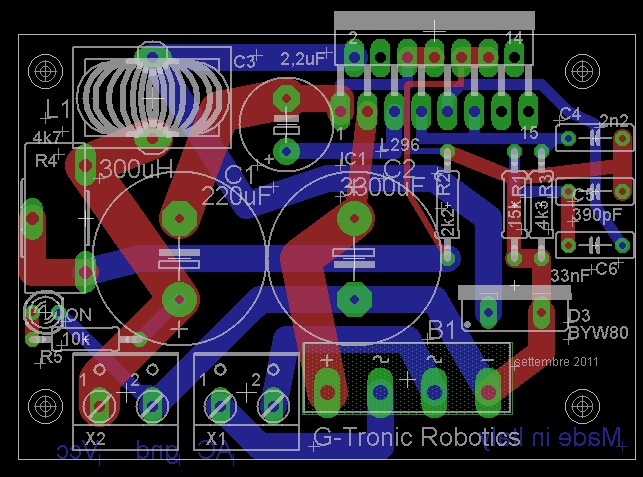
download File Eagle e file costruttivi gerber della realizzazione
Il morsetto più a sinistra è l'uscita di tensione (regolabile o fissata agendo sul trimmer), mentre quello di destra è l'ingresso alternato.
Punti da ponderare.
Innanzi tutto è da notare che le resistenza del LED è fissata ad un del tutto
generico 10K, questo perchè è stato inserito in un punto in cui la tensione
potrebbe variare di valore (oppure no a seconda dell'utilizzo che si intende
fare del dispositivo). Una volta deciso l'utilizzo, ad esempio uscita fissa a
5,5 volt allora si prodecederà al calcolo effettivo con la solita procedura,
ovvero sulla maglia vale:
Vout - IdR5-Vgamma=0
Sostituendo i valori con alcuni di riferimento abbiamo che, con uscita a 5,5V e con una corrente del diodo fissata a 2mA, e dato che la Vgamma è circa 2V, si ottiene:
5,5-0,002*X-2=0
da cui, mettendo in evidenza l'incognita X, otteniamo:
X=(5,5-2)*1000/2
otteniamo X=1750 ohm che arrotondiamo al valore standarpià prossimo ovvero 1k7
Nella prossima foto uno dei molti esemplari (su PCB eseguito con fotoincisione domestica) su cui sono stati eseguiti numeri test e messe in servizio nei laboratori privati di molti studenti e hobbysti.

Questo esemplare è stato costruito diverso tempo fa ma è ancora in uso con grande soddisfazione.
Buon divertimento a tutti
Marco Visentini
![]() This opera
"Let's GO PIC19" is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike
3.0 Italy License
This opera
"Let's GO PIC19" is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike
3.0 Italy License
Concorso vinci il PCB della Micro-GT
Sul link seguente troverai le condizioni per concorrere alla vicinta el circuito stampato della Micro-GT presentata in questo articolo.
Leggi attentamente le condizioni per partecipare e riceverai via posta il tuo esemplare.
http://www.gtronic.it/energiaingioco/it/scienza/vinci_Micro-GT.html
Per gli utenti che volessero recarsi in visita a Padova, visitate il sito di jenny tramite il link sottostante.