In questa pagina sono presentati schemi ed esercizi con le interfacce G-Tronic e Micro-GT presenti nei cofanetti didattici a partire dall’anno scolastico 2023.
Il primo cofanetto, denominato PLC Kit 1, contiene le schede sotto elencate da cui link si scarica la scheda tecnica che mostra in forma breve i cablaggi e gli schemi elettrici.
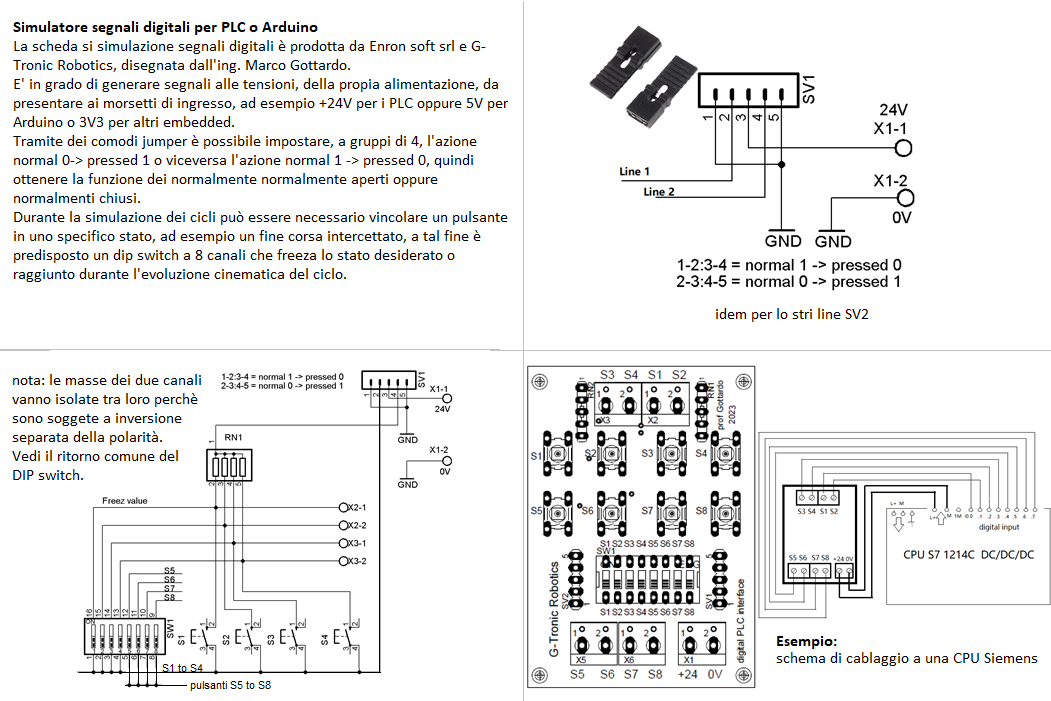
- interfaccia digitale a 8 canali
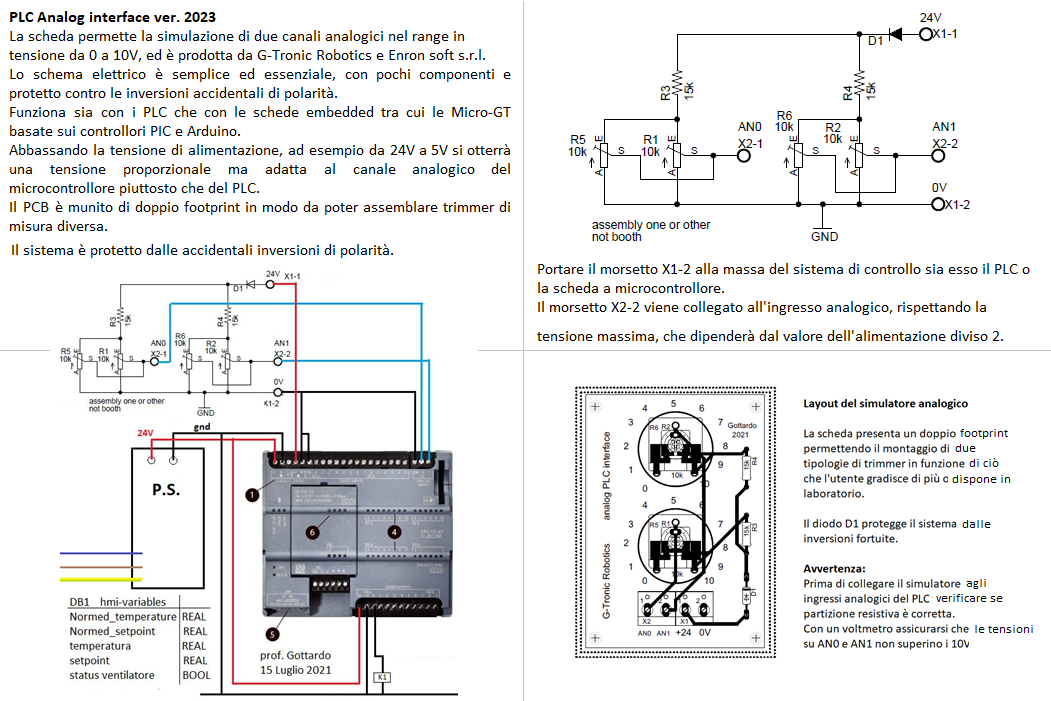
- interfaccia analogica a 2 canali 0..10V
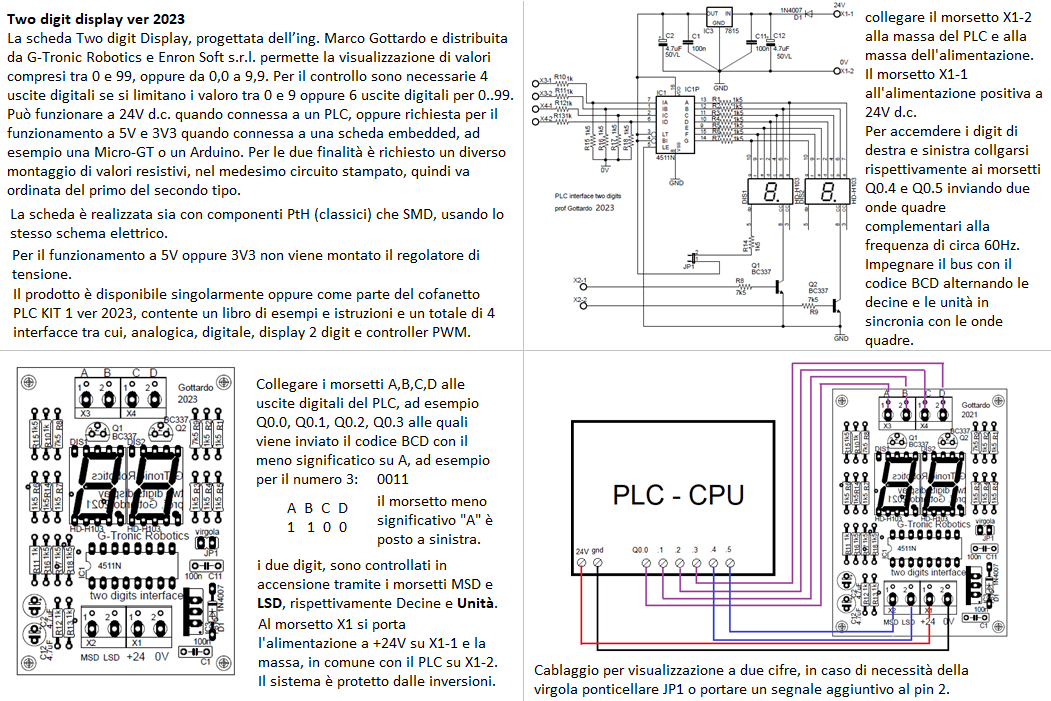
- interfaccia display LED a 2 digit
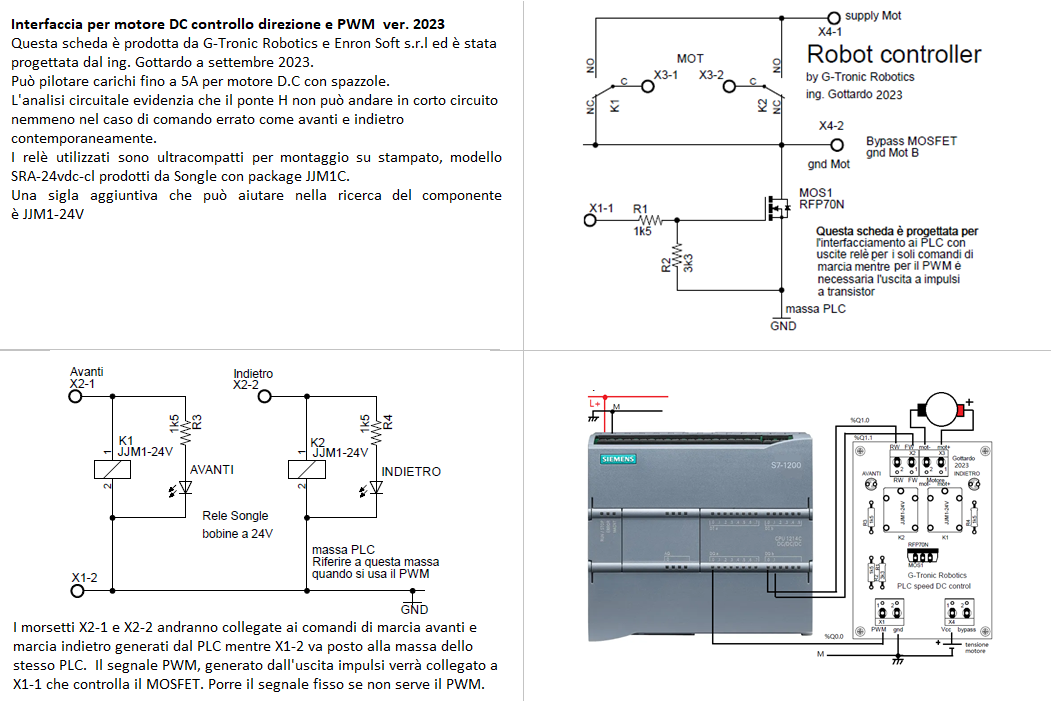
- interfaccia PWM e inversione del motore DC
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Il secondo cofanetto, denominato PLC Kit 2, in preserie e in distribuzione dall’anno 2024 contiene le interfacce:
{kind=link}
L’istituto, a partire dall’anno scolastico 2023, è stato dotato di postazioni mobili basate su PLC Kit 1, upgradabili nel tempo in grado si soddisfare ampiamente le esigenze didattiche di primo livello, come dal contenuto del testo didattico, edizioni G-Tronic, PLC Siemens Per ITIS e IPSIA: Esercitazioni guidate per istituti tecnici con basi di pneumatica Copertina flessibile – 26 maggio 2023 – ISBN:979-8396076563 reperibile presso la Libreria Progetto, Via Giovanni Gradenigo, 2, 35131 Padova PD, tel:049 807 6056, con carta docente e bonus cultura, oppure su Amazon al link:
Libro per istituti tecnici
Postazione PLC Kit 1 mobile in uso all’istituto severi
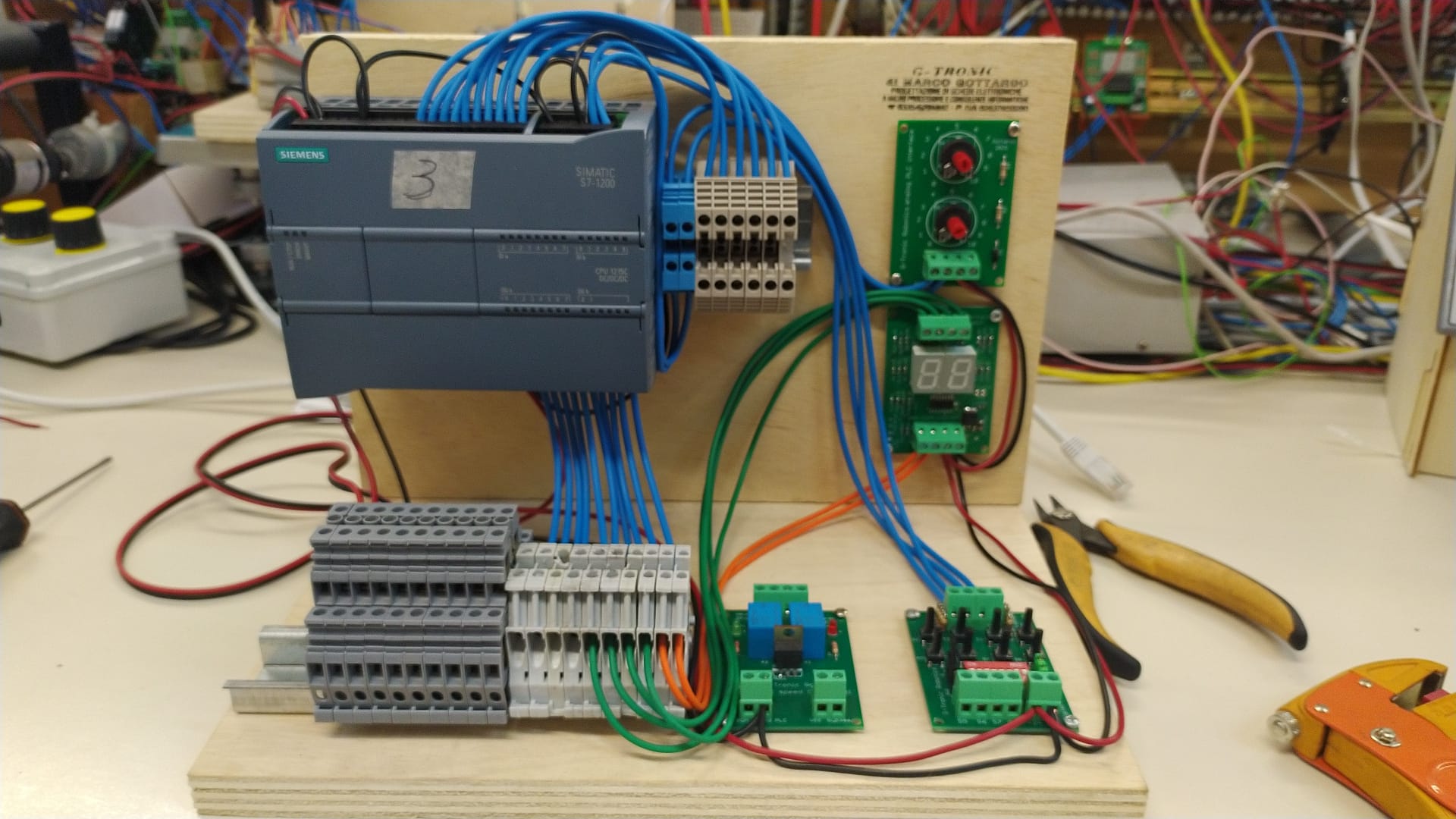
Le stazioni sono molto compatte e estremamente maneggevoli per poter essere rapidamente riposte negli armadi a fine di ogni lezione, evitando così l’accumulo di polvere o danneggiamenti dovuto all’uso improprio durante i periodi in cui non si svolgono le lezioni. Per la messa in opera basta collegare un doppino rosso e nero all’alimentatore 24V dc e un cavo di rete. Il tutto avviene in pochi secondi. Lo spazio richiesto per lo stoccaggio è estremamente rapido.

Nel video viene mostrato la funzionalità di base di una delle stazioni, il programma è utile per testare i cablaggi e le funzionalità di base.
Scarica il programma demo per testare le stazioni PLC kit 1 versione 2023
Severi stazione 5_20231012_1056
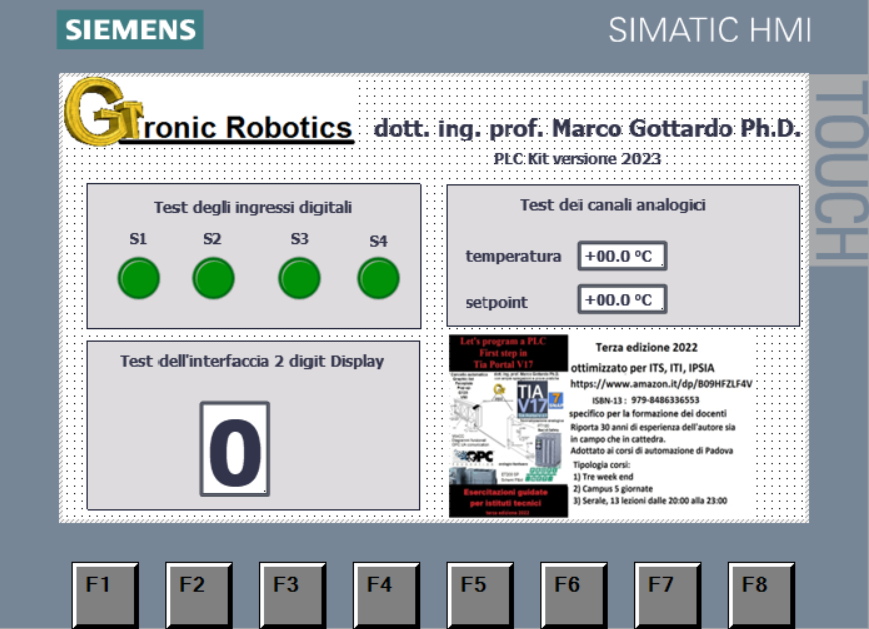
Il programma mostra questa semplice interfaccia posta su pannello operatore KTP700 Basic. E’ importante, in vista di rete, sostituire gli IP con quello della stazione in cui si vuole testare, an esempio, se vogliamo provare la stazione 4, andare in vista di rete e sostituire l’indirizzo con 192.168.0.4, quindi compilare hardware e software e caricare nella CPU.
Stepper interface
I motori stepper sono caratterizzati dall’eseguire movimenti rotatorie come risultato del susseguirsi di scatti angolari di piccola ampiezza, passando da una posizione stabile a quella successiva, seguendo un segnale di clock proporzionale agli RPM dell’asse.
Vi sono due principali tipi di motori stepper:
- Motori con due bobine bipolari
- Motori con 4 bobine bipolari
Nell’industria è molto in uso una variante che dispone di una terza bobina bipolare noti con il nome di brushless, che hanno una grande affinità con gli stepper propriamente detti.
Il controllo delle bobine unipolari avviene con 4 semplici transitor o Darlinghton che le collegano alla massa quando il PLC invia il segnale di comando. Il comune delle bobine è invece posto a +Vcc del valore indicato nella targhetta del motore.
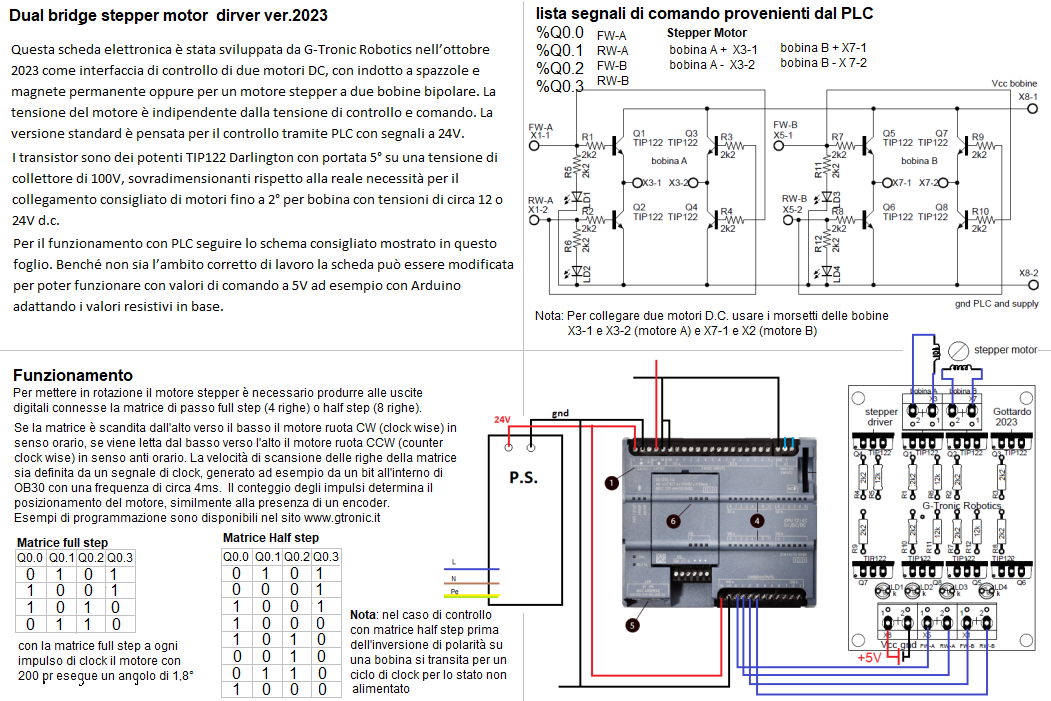
Il controllo delle bobine bipolari è invece delegato a due ponti H, realizzabili con circuiti integrati, ad esempio il vecchio L298, oppure potenti transistor con il vantaggio della robustezza in grado di resistere anche in caso di errore di comando o corto circuito. In genere gli alimentatori collegati a questi sistemi sono più ridotto in corrente di quanto ne possa portare il transistor, entrando quindi in protezione. Lo schema è mostrato sotto.
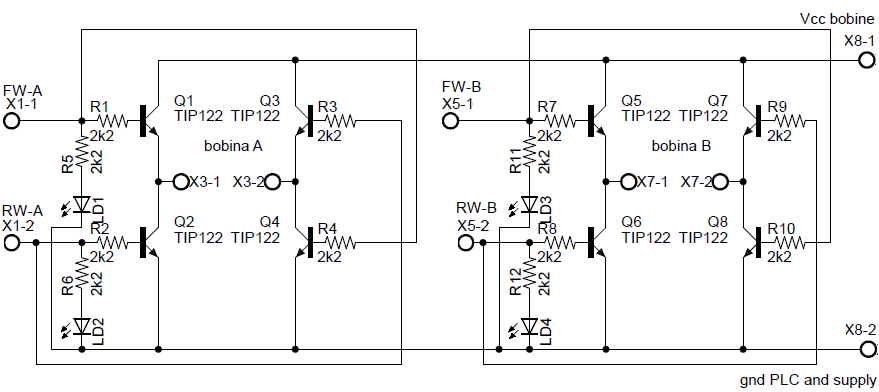
E’ facile dedurre che la stessa scheda può essere utilizzata per il controllo di due potenti motori DC invece che per il singolo motore stepper bipolare.
il layout della scheda è questo, in cui sono visibili i morsetti collegamento al motore al PLC e all’alimentazione esterna delle bobine. Va posta attenzione al valore in Volt perché i motori stepper sono costruiti in un ampia gamma di valori che va da pochi Volt a oltre 50V.
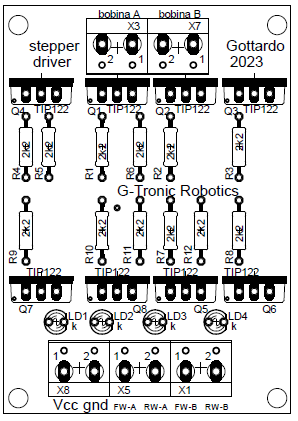
Sul lato superiore vengono collegate: inizio e fine della prima bobina e inizio e fine della seconda bobina.
Sul lato inferiore, da sinistra, il positivo dell’alimentazione del valore di targa del motore, ad esempio +5V, e a seguire la massa di questo alimentatore, che sarà comunque riportata anche alla massa del PLC.
I quattro morsetti che seguono sono i comandi delle bobine, nella serigrafia indicate con FW-A, RW-A ovvero avanti e indietro di un motore DC collegato ai morsetti X3-2 e X3-1 Mentre i morsetti FW-B e RW-B analogamente per un secondo motore collegato ai morsetti X7-2 e X7-1.
Dato che qui sono connesse le bobine di un motore stepper bipolare ciò che vedremo è nell’immagine.
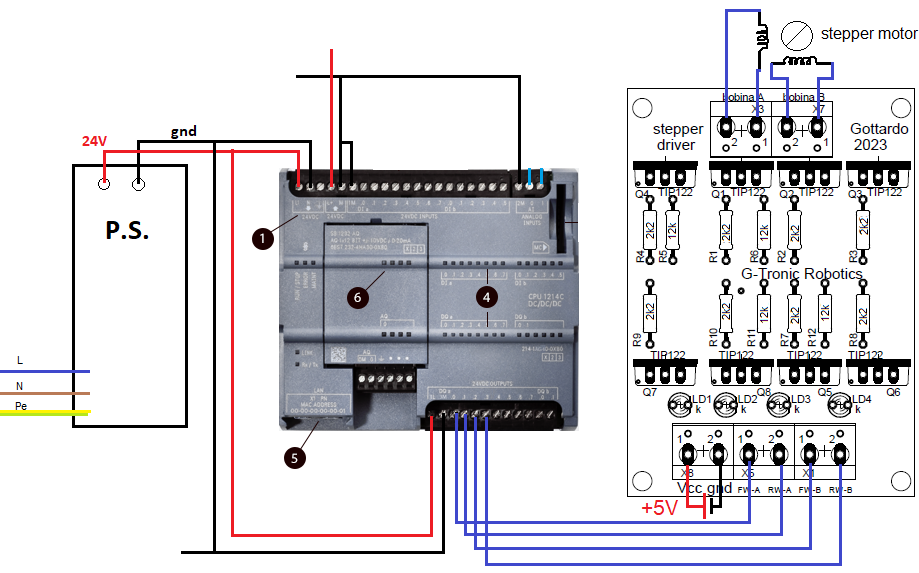
Nota bene: La massa dell’alimentatore a 5V deve essere portata in comune con la massa dell’alimentatore del PLC o i segnali non avranno effetto. Portare il filo nero collegato al morsetti “gnd” della scheda a uno dei morsetti M del PLC.
Scarica il programma demo per utilizzare la scheda dual bridge
La matrice di passo “FULL STEP” si costruisce facilmente a partire da una configurazione base e successivamente cambiando di stato i capi delle singole bobine, una alla volta a intervalli temporali regolari, ad esempio 4ms.
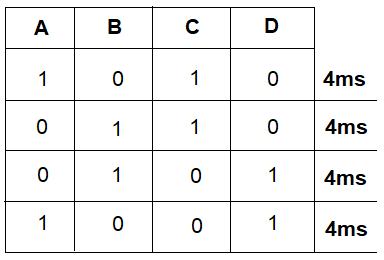
Oltre alla matrice Full step, mostrata sopra, esiste la matrice half step, composta da 8 righe invece che 4, che ha la caratteristica di spegnere la bobina prima di invertila, ecco che tra la prima e la seconda riga si introduce, ad esempio, la configurazione 0,0,1,0. Essendo necessari 8 passi invece che 4, a parità di clock il motore dimezza la velocità mentre la risoluzione angolare raddoppia.
Il valore 1 indica il positivo dell’alimentazione nella rispettiva bobina, lo zero è invece il valore della massa, in questo caso zero volt. Ad esempio la prima mostra le uscite Q0.1 e Q0.3 alte, ovvero +24V nel rispettivo morsetto dell’interfaccia, mentre i rimanenti Q0.0 e Q0.2 sono spente ovvero ai morsetti corrispettivi dell’interfaccia arrivano 0V
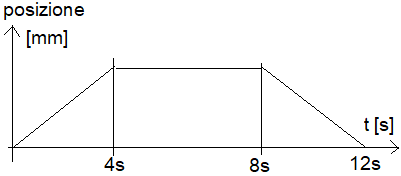
Il programma demo che esegue il diagramma di corsa trapezoidale, della durata di 12 secondi, rappresentato come tempo posizione, nell’immagine, è scaricabile dal link che segue la TAGS table e il Data Block.
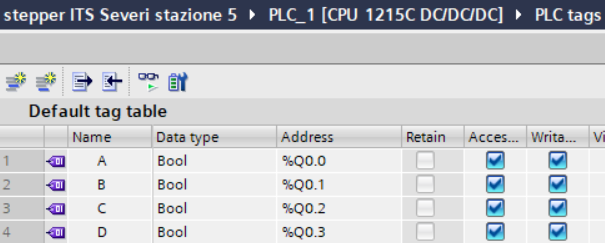
I collegamento con l’interfaccia Stepper drive sono definiti nella Tags table:
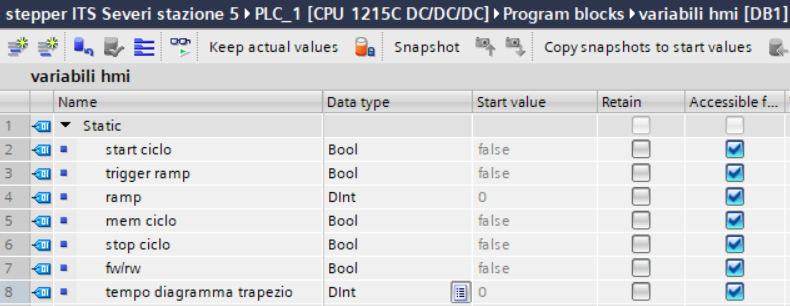
Nel data block globale DB! sono definite le seguenti variabili di processo:
 Il programma è scaricabile da questo link, per TIA V18, ottimizzato per la postazione 5 dell’ITI Severi, con CPU 1215C DC/DC/DC V4.5 indirizzo 192.168.0.5 e pannello operatore KTP700 Basic, con firmware V16.0.0.0 e indirizzo 192.168.0.7
Il programma è scaricabile da questo link, per TIA V18, ottimizzato per la postazione 5 dell’ITI Severi, con CPU 1215C DC/DC/DC V4.5 indirizzo 192.168.0.5 e pannello operatore KTP700 Basic, con firmware V16.0.0.0 e indirizzo 192.168.0.7
Scarica -> stepper ITS Severi stazione 5_20231012_1644
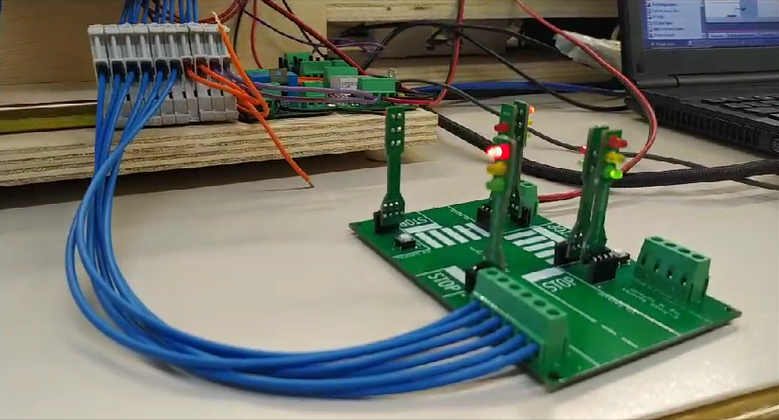
Modellino didattico: Incrocio semaforico con attraversamenti pedonali
Mockup: Impianto semaforico con attraversamenti pedonali, 21 Settembre 2023 L’orologio hardware del PLC definisce se si trova in ciclo diurno standard oppure in ciclo notturno.
E’ possibile differire i cicli a seconda delle fasce orarie tendo conto delle ore di punta e della priorità delle strade.
Costo: 40€
Spese spedizione: 5€ con posta tradizionale
Per ordinazione scrivere alla mail: ad.noctis@gmail.com (anche fattura PA)
Varianti dell’esercizio in ordine di difficoltà:
1) ciclo base, con tempi rosso verde e giallo uguali
2) ciclo semplice con tempi diversificati di rosso, giallo, verde
3) ciclo semplice con accensione delle luci pedonali.
4) ciclo semplice con chiamata pedonale prioritaria.
programmi più complessi, per studenti di livello avanzato
5) ciclo notturno e diurno basato sull’orologio hardware.
6) ciclo con calendario mensile e annuale che tiene conto delle festivit�
7) riportare a pannello operatore le liste grafiche che mostrano gli stati
8) T-Red, aggiungere una fotocellula che segnala chi passa con il rosso
Scarica le regolamentazioni-semaforiche calcolo dei tempi ciclici
Questo modellino, molto compatto ed economico, è adatto per tutti i laboratori scolastici o per l’auto istruzione. I paletti sono estraibili rendendo il modello facilmente stoccabile dopo l’uso. I pulsanti sono predisposti per l’attraversamento pedonale rendendo il programma più affascinante da sviluppare. I contenuti tecnici da apprendere con l’uso di questo piccolo modello sono: Creazioni di rampe cicliche di lunghezza arbitraria, utilizzo dei comparatori IN_RANGE, utilizzo delle bobine S e R, eventuale utilizzo alternativo del comando MOVE di un intero nella morsettiera, e molto altro. I programmi sono disponibili nel libro di testo e in questo sito.
Circuiti stampati per l’auto assemblaggio:
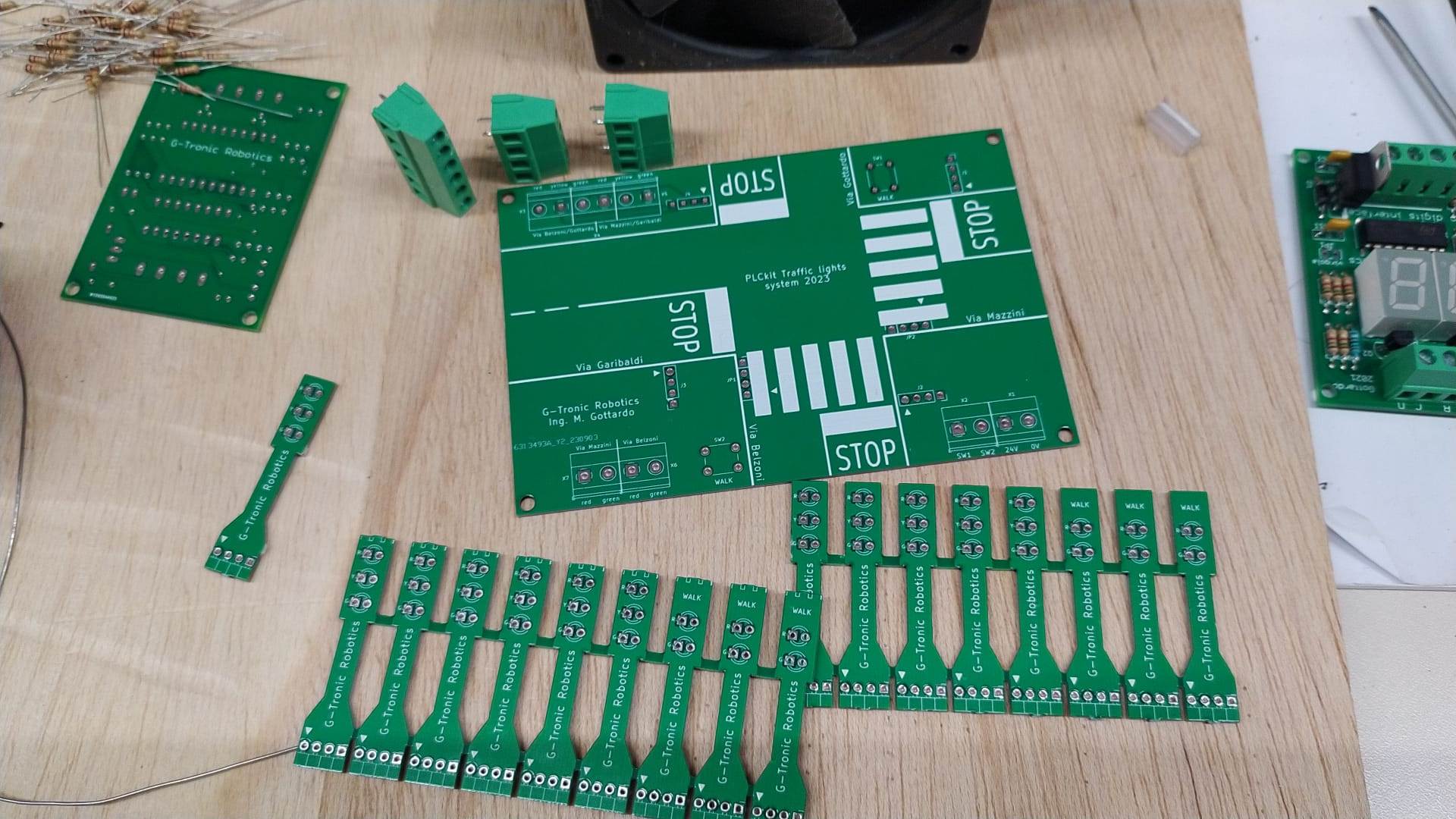
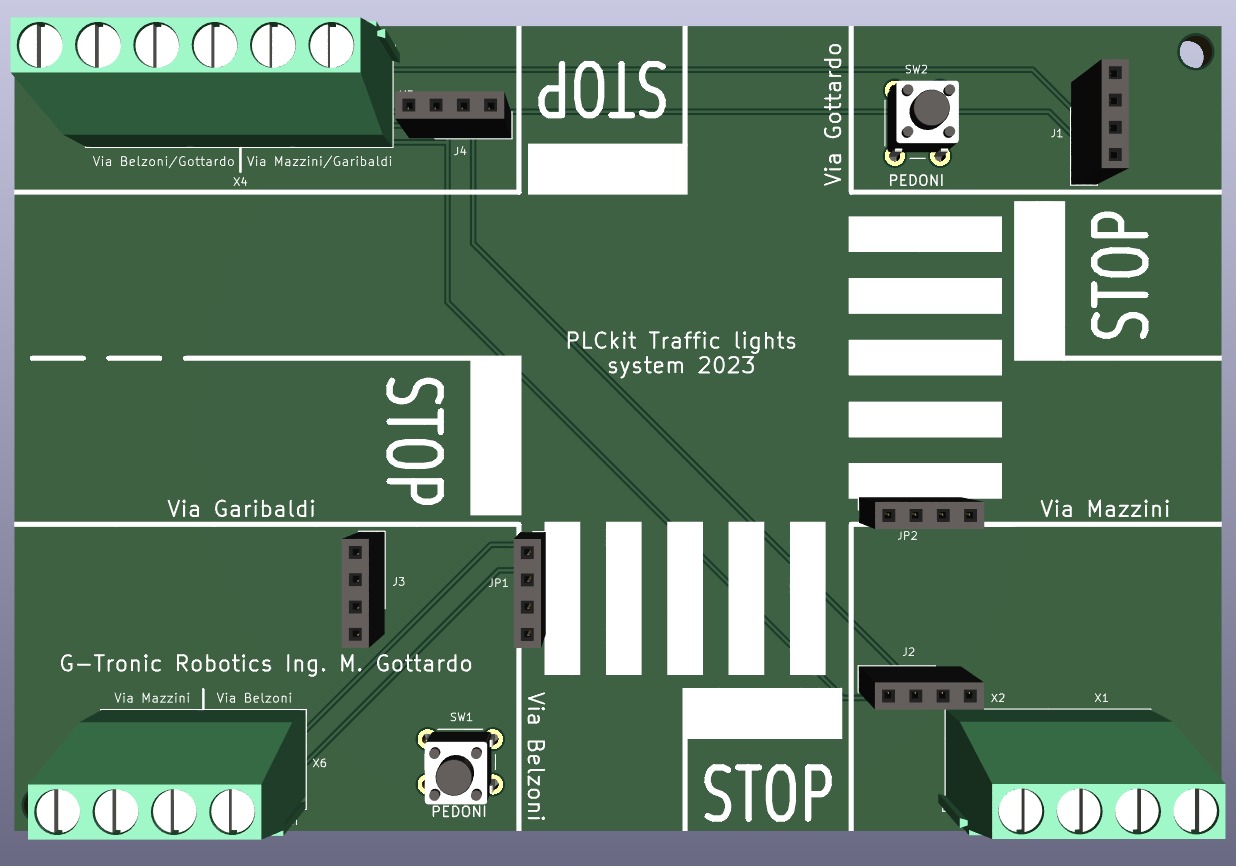
Layout della base del modellino:
Nell’immagine sottostante mostriamo una configurazione consigliata per i cablaggi al PLC. Sono necessarie 10 uscite digitali e due ingressi. Le uscite sono quelle disponibili nella CPU modello 1214C DC/DC/DC.
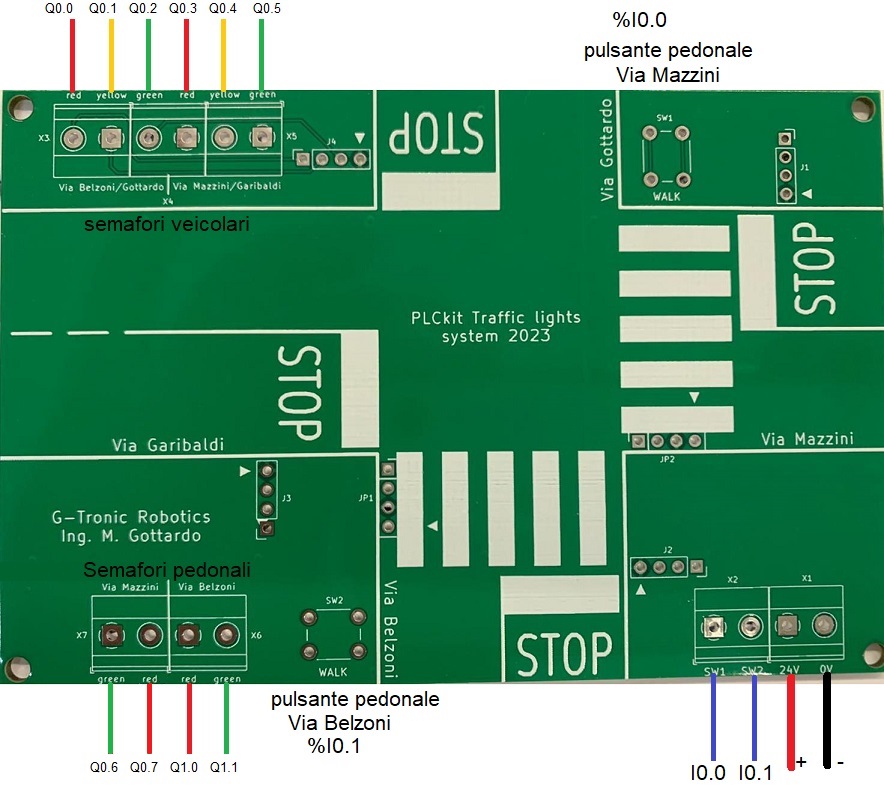
Lista delle attribuzioni (PLC tags table)
Digital output
%Q0.0 Red Via Belzoni
%Q0.1 Yellow Via Belzoni
%Q0.2 Green Via Belzoni
%Q0.3 Red Via Mazzini
%Q0.4 Yellow Via Mazzini
%Q0.5 Green Via Mazzini
%Q0.6 Pedestrian Red Via Mazzini
%Q0.7 Pedestrian Green Via Mazzini
%Q1.0 Pedestrian Red Via Belzoni
%Q1.1 Pedestrian Green Via Belzoni
Digital input
%I0.0 Call to walk Via Mazzini
%I0.1 Call to walk Via Belzoni
Selettore ciclo notturno o diurno
Questo segnale non è a bordo del modellino ma possiamo collegarlo all’ingresso %I0.2, come selettore rotativo, oppure al panello operatore,
Ciclo per esercizio base
Nel primo esercizio vengono date le configurazioni semaforiche che cicleranno in maniera indefinita con tempi uguali, senza considerare i tempi diversi per il giallo, l’eventuale priorità della strada, i cicli notturni e diurni e senza attraversamenti pedonali. Il contenuto tecnico riguarda l’abilità dell’allievo nel creare una rampa e dividerla in 4 settori nonché la proiezione nelle morsettiere dei corretti stati.
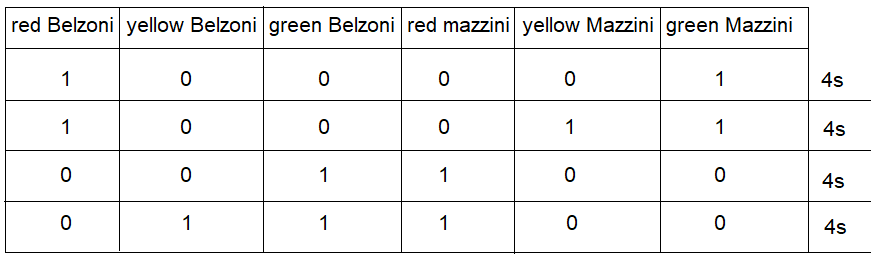
Osservando la tabella notiamo che il tempo ciclico totale è di 16000 ms.
Definiamo nel DB globale una variabile Rampa di tipo DINT, da porre in ET del time TON chiamato Ramp generator. Definiamo anche una variabile bool chiamata trigger ramp.
Generazione della rampa ciclica tramite TON.
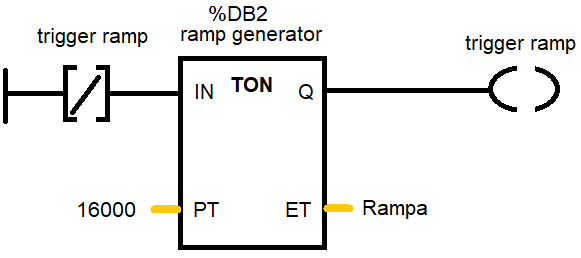
Dividiamo la rampa in 4 settori uguali, per questo specifico caso, usando quattro comparatori IN_RANGE le cui uscite ditali permettono il controllo in SET e RESET delle bobine delle lanterne semaforiche come richiesto dalla tabella data.
Il primo IN_RANGE avrà questo aspetto:
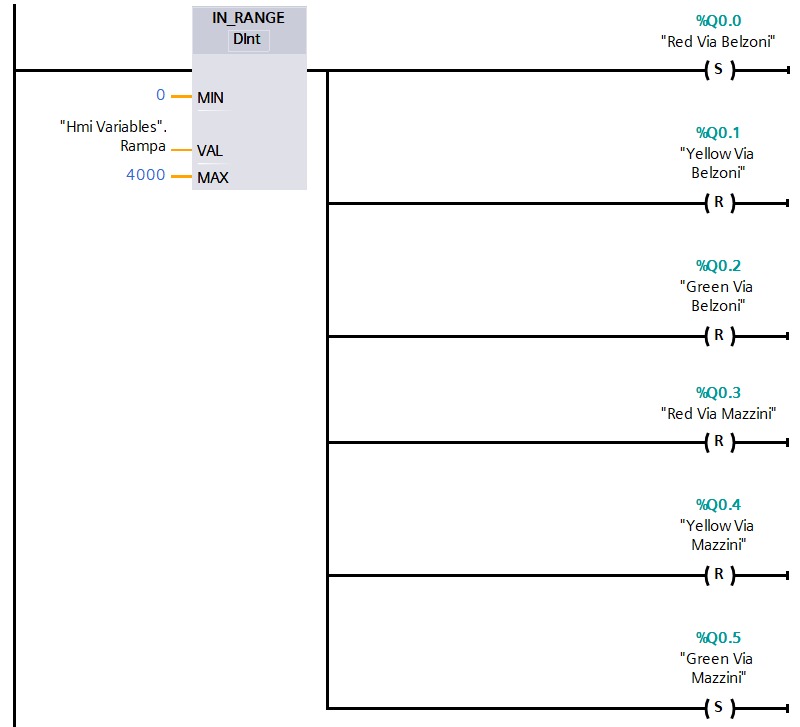
Come mostrato sopra le prime 6 uscite digitali, nei tempi di rampa ciclica compresi tra 0 e 4000 milli secondi hanno la combinazione 100001 come richiesto dalla prima riga della tabella fornita sopra.
Per analogia vanno completati altri 3 segmenti per le righe mancanti della tabella tenendo in considerazione che il minimo del prossimo comparatore IN_RANGE dovrà attivarsi almeno 1 milli secondo dopo al campo ammesso del precedente, ovvero da 4001.
Scarica il programma di esempio Cicli Semaforici.zap18 (1)
La versione completa, che contiene un HMI e la gestione dei cicli diurni e notturni è scaricabile dal prossimo link.
Durante il ciclo notturno i pali semaforici passano in lampeggio del giallo a frequenza 1Hz. Durante il ciclo diurno sono attive le chiamate pedonali che interrompono il normale ciclo e danno la precedenza ai pedoni.
Cicli Semaforici con orologio settimanale e cicli pedonali.zap18
Libro di testo per l’adozione scolastica: PLC Siemens per ITIS e IPSIA