Acquisizione encoder assoluto modello TRelettronic GmbH PROFINET 01/10/2022
Progetto sviluppato con TIA PORTAL V18 il giorno 11 marzo 2023.
Questo esempio mostra la configurazione di un Encoder che dispone di porta di comunicazione PROFINET direttamente sul device, quindi non mostra i fili canonici che portano le onde quadre delle fasi, ma un solo cavo munito di connettore RJ45.
scarica il manuale dell’encoder TRelectronic manuale encoder tr electronic profinet
Scarica pdf per encoder assoluto marca generica Profinet_Manual_STEP7TIA
Vai alla pagina dedicata Encoder assoluto Profinet
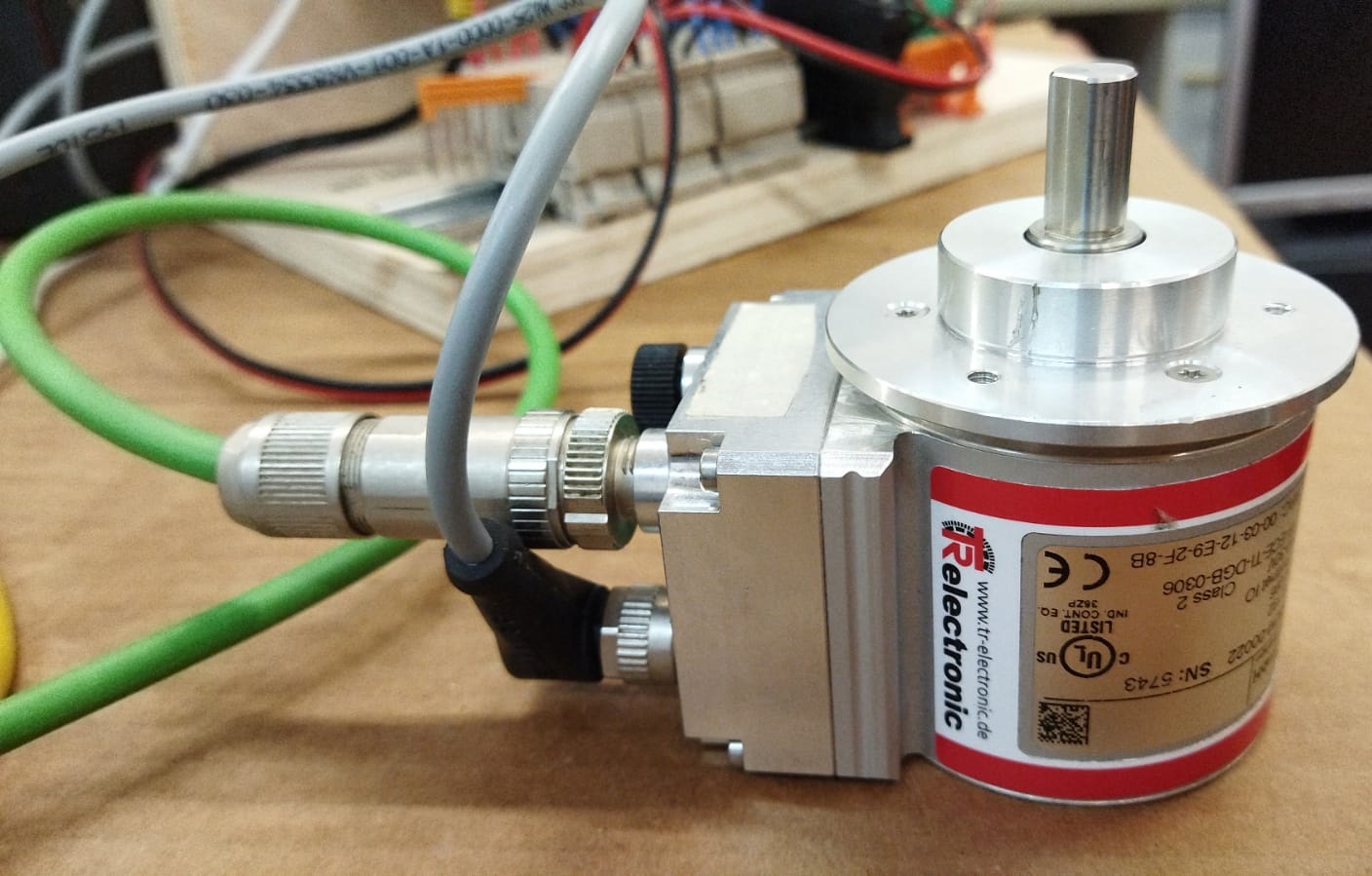
l’etichetta del dispositivo indica le caratteristiche di base, ad esempio il tipo di interfaccia, in questo caso PROFINET -IO e il numero di impulsi Steps=8192 in modalità 2x e Revolution=4096 in modalità 1x. Nel primo caso legge entrambi i fronti dell’onda quadra interna mentre nel secondo il solo fronte di salita.

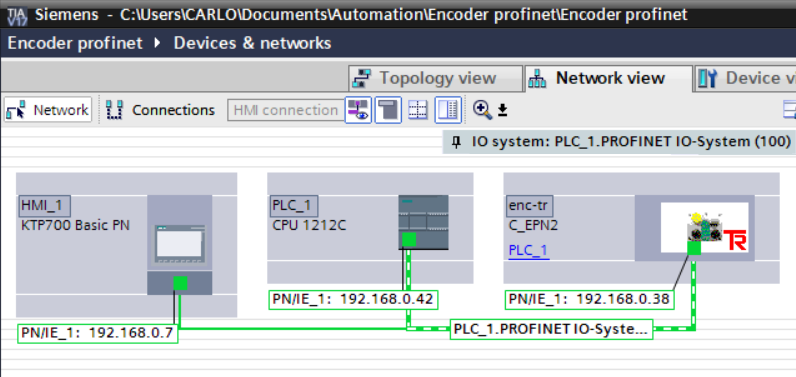
L’assegnazione dell’IP al dispositivo avviene semplicemente imponendolo nella vista di rete di TIA PORTAL quello desiderato. Al caricamento dell’Hardware verrà impostato il valore facendo attenzione a non causare conflitti con altri dispositivi pre esistenti nella medesima rete dell’automazione. L’encoder corretto, in un pianto reale dovrebbe trovarsi nel documento P&ID o nello schema elettrico.
L’encoder è di tipo assoluto, ovvero rispetto a uno zero, impostabile anche da software, produce un offset che può essere positivo o negativo.
Il valore viene restituito su una variabile DINT definita in un DB globale.
La lettura è possibile solo dopo la corretta installazione dei file GSD distribuiti dal costruttore del device.
scarica i file GSD per TIA V17 GSDML-V2.35-TR-0153-PNRotative2-20210223
L’istallazione dei file descrittivi permetteranno anche la visualizzazione dell’immagine, fornita come bitmap, dell’oggetto in vista di rete.
Pacchetto completo con altre versioni dei GSD e scaricabile da questo link:
gsd encoder TR electronic
Il programma troverà correttamente il device nella rete PROFINET solo se il suo nime è univoco, quindi è necessario, al fine di spegnere la luce rossa lampeggiante indicate errore di comunicazione, eseguire l’assegnazione del nome al nodo come nell’immagine:
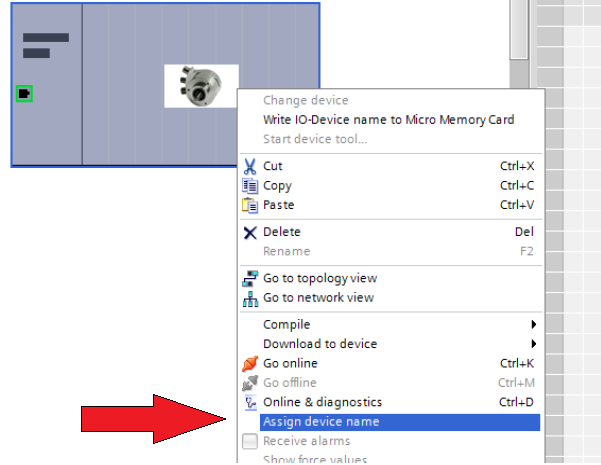
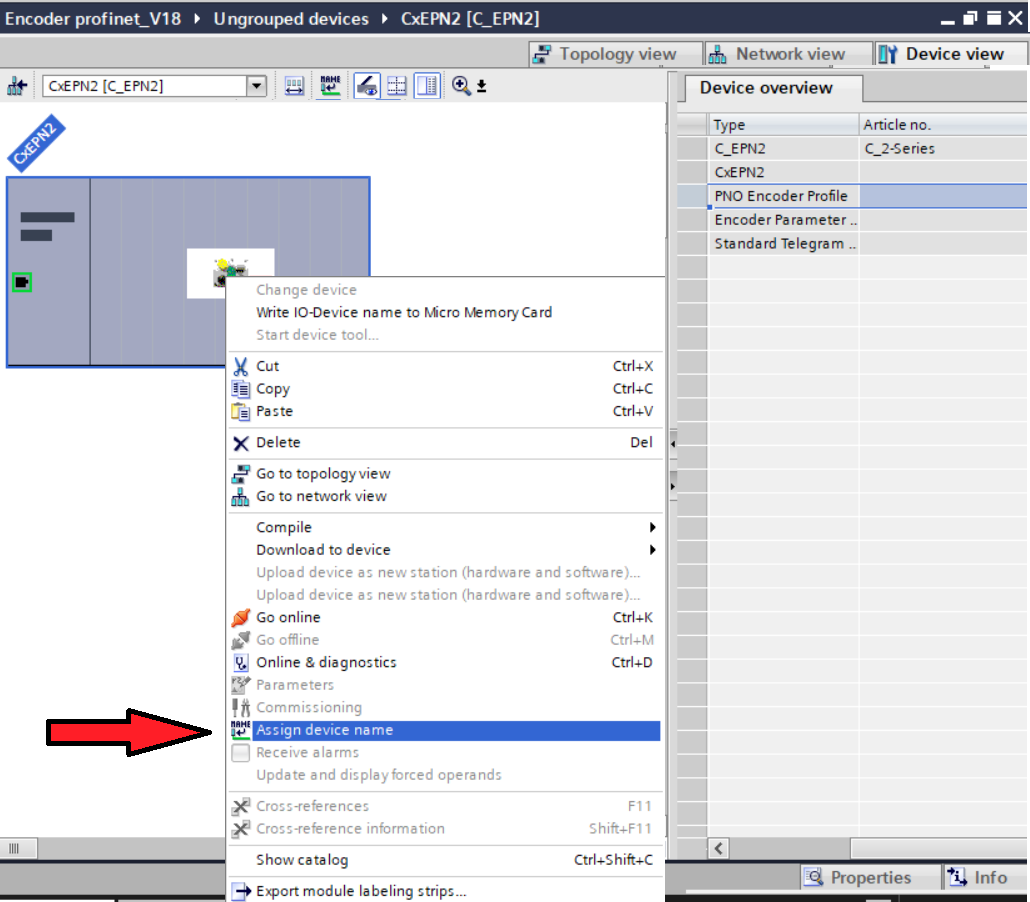
Questo si esegue dalla vista di rete facendo tasto destro e proprietà del device quando posto online.
Il programma dimostrativo eseguito con TIA PORTAL V17 è scaricabile da questo link, a cui si potrà eseguire “Change device” della CPU per adattarlo al modello di cui si dispone.
Scarica programma di esempio -> Encoder profinet
Scarica programma testato 28/01/2023 => Encoder PN Encoder PN 28/01/2023
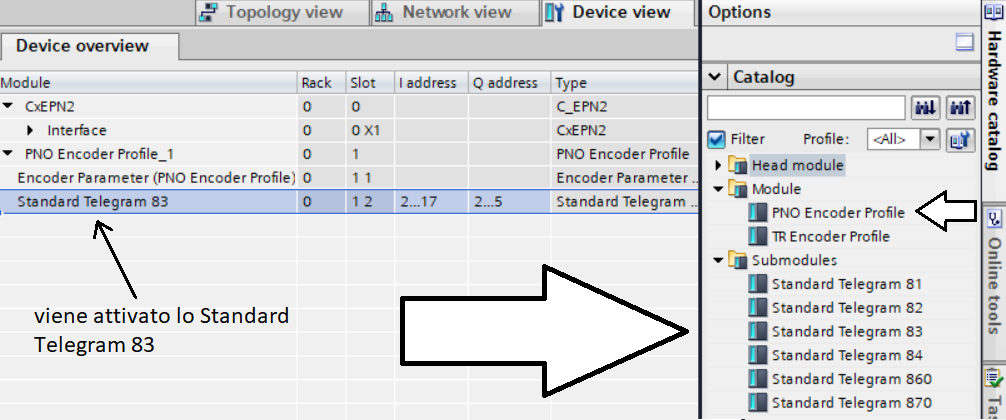
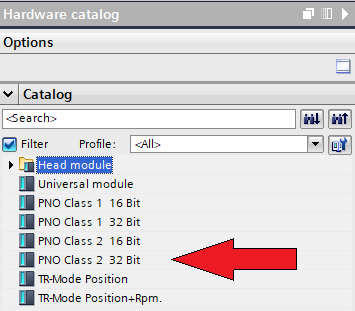
La configurazione del device, richiede l’aggiunta dei moduli di comunicazione come mostrato nell’immagine:
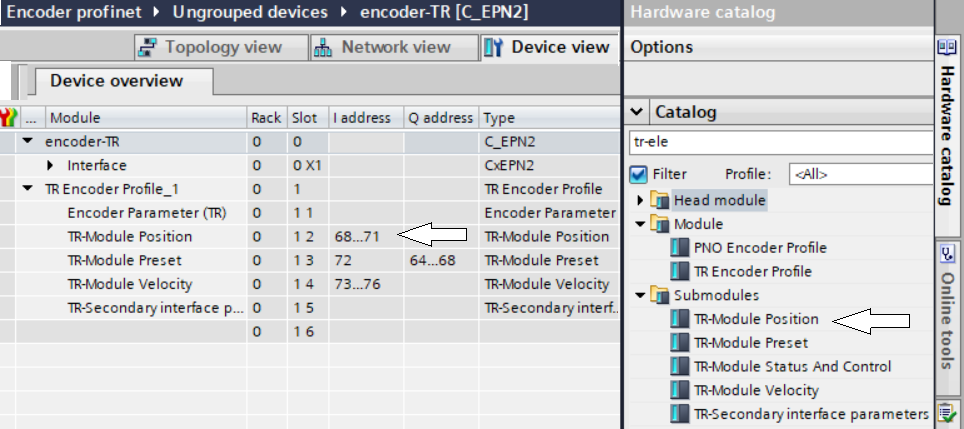
Attenzione: Per visualizzare gli Standard Telegram da 81 a 87, cliccare prima su “Module” seguito da “PNO Encoder Profile”, la lista dei Telegram compare quindi al posto dei “TR module” visualizzati sull’immagine sovrastante.
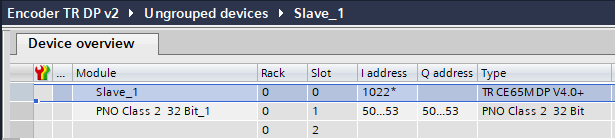
La configurazione per la lettura della velocità della parte mobile installeremo il submodule “TR-Module Velocity” mostrati nell’immagine.
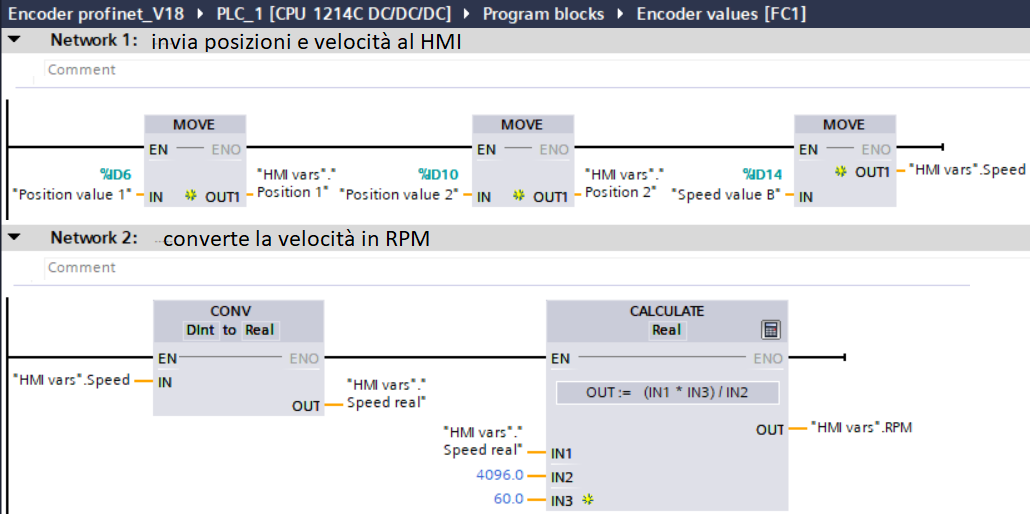
La semplice lettura della posizione potrà effettuarsi semplicemente leggendo l’indirizzo ID68 con un comando MOVE.
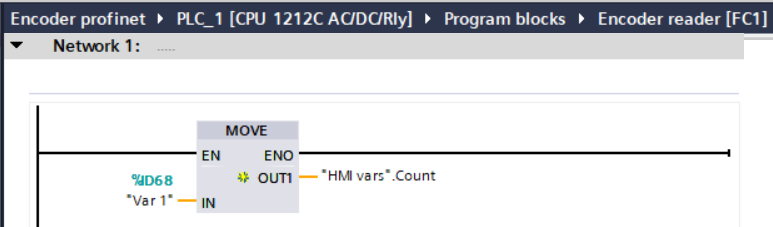
Per leggere alcuni registri in più si potrà fare come mostrato sotto
Acquisizione encoder modello E620 2000 10 24 R8 PP2 con S7-1200.
Questo programma è stato sviluppato al corso di programmazione avanzata dei PLC Siemens tenuto a Padova. Fa parte di un contesto più grande che è stato tolto per focalizzare l’attenzione sull’attivazione dell’HSC.
La piattaforma software è il TIA Portal V17 basic, ovvero i CD contenuti nello starter KIT distribuito da Siemens con la CPU S7-1200 modello 1212C-AC/DC/Relè. L’esatta versione firmware è visualizzabile nella configurazione hardware.
Attenzione: Nelle proprietà della CPU potrebbero essere impostati dei filtri sugli ingressi digitali, utili come anti rimbalzo o anti segnale spurio, che introducono una sorta di “delay” sull’acquisizione del segnale. Supponiamo che il nostro encoder fornisca 2000 impulsi al giro ma che i filtri impostati abbiano un tempo di reazione troppo lento rispetto alla frequenza che dobbiamo leggere. Il risultato sarà che l’eventuale valore caricato su una variabile, su un DB o visualizzato sul touch pur reagendo al movimento dell’encoder riporteranno un valore anche di molto in inferiore. Più lungo è il filtro e più sballato sarà il valore letto. Quindi andiamo nella sezione proprietà della CPU, digital I/O, digital inputs, e canale per canale impostare 20u sec (microsecondi).
Per chiarire le funzioni HSC scarica questo pdf -> ufficial HSC siemens.
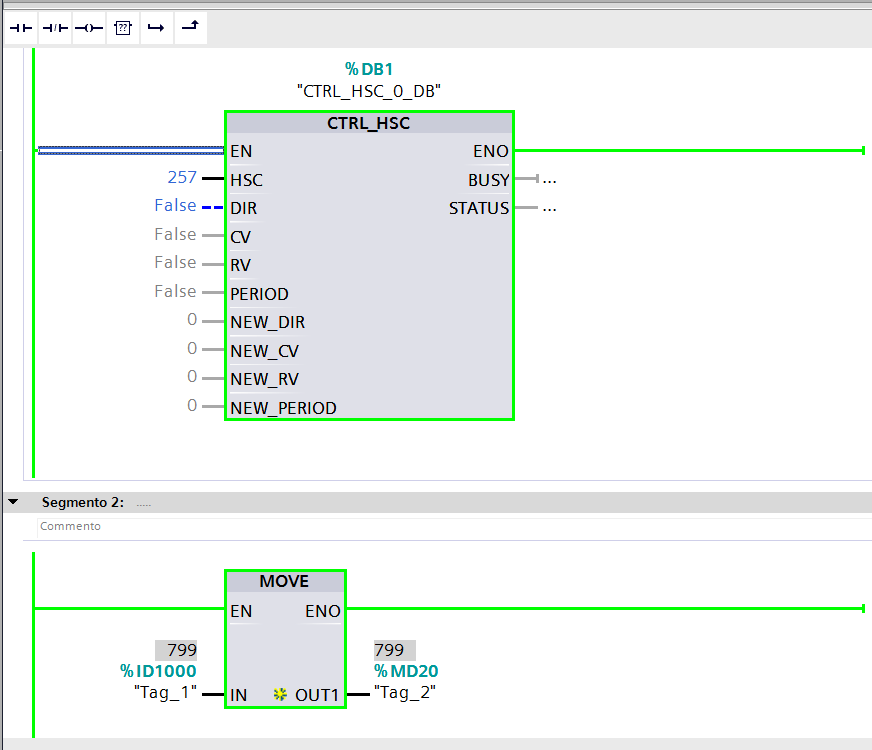
Il DB di istanza contiene le seguenti variabili:
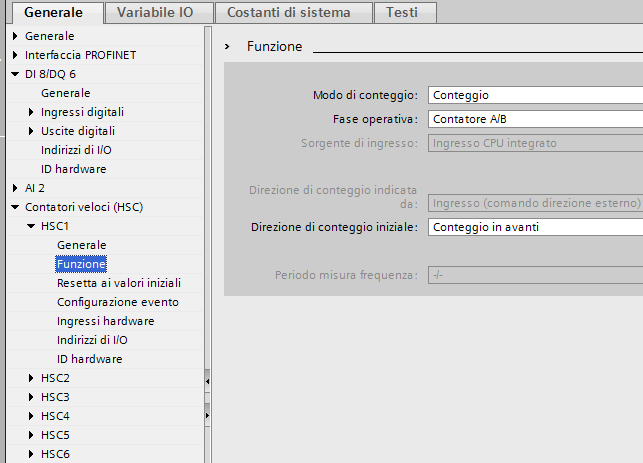
Il programma funziona solo se sono state effettuate le corrette configurazioni hardware degli HSC. Queste saranno: L’abilitazione mettendo lo spunto su HSC1 (o gli altri canali) nel menu, sotto a generale (della CPU), HSC1 ..”attiva questo contatore veloce”. A seguire, sulla voce funzione, impostare come da immagine sottostante:
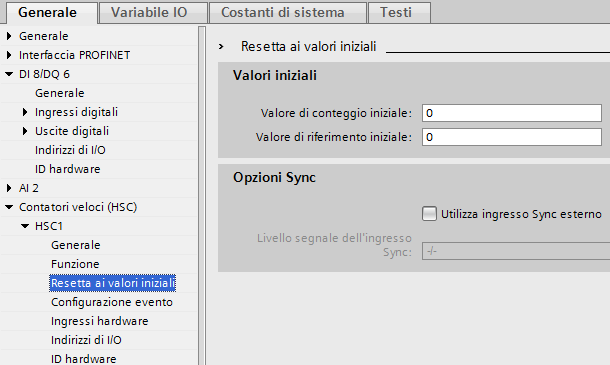
Alla voce “Resetta i valori iniziali” come da immagine:
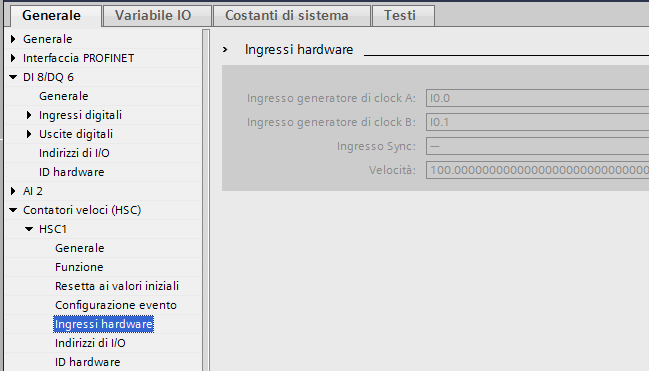
la voce configurazione evento, al momento la lasciamo libera. Alla voce ingressi Hardware impostiamo gli ingressi fissi come da immagine:
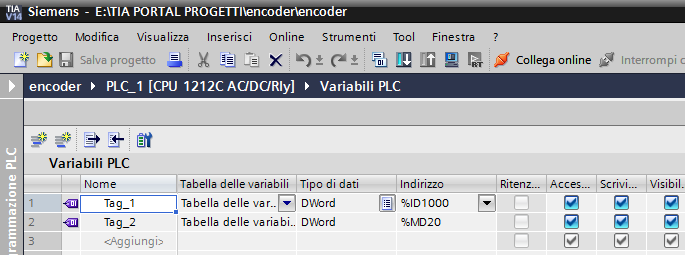
Impostare gli indirizzi di I/O come da immagine:

scarica il programma di esempio. encoder
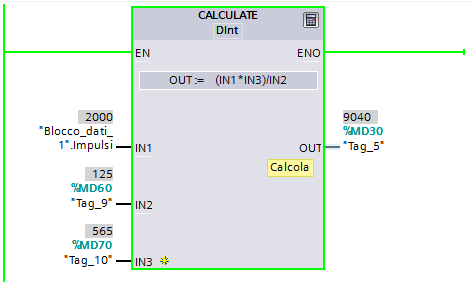
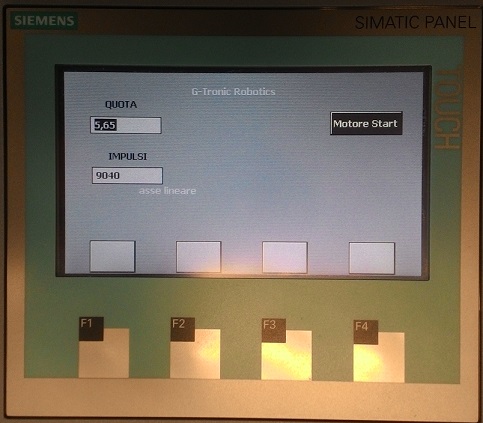
Scarica versione del programma con pannello operatore KTP400 e contatore A/B. Questo programma è stato sviluppato nella lezione del 18/06/2017. Si vuole controllare un asse lineare progettato con una barra filettata che per ogni giro avanza di 1,25mm, ovvero ogni 2000 impulsi dell’encoder utilizzato. Nel touch viene richiesta la quota di posizionamento dell’asse in mm con due decimali dopo la virgola, ad esempio la quota 5,65 mm viene prima moltiplicata per 100 (allo scopo di togliere la virgola) e poi convertita dal formato Real to Double Int. Viene spatata in un merker Double. Viene convertita dalla funzione calcolate in 9040 impulsi.
Il comparatore della quota inserita è impostato nell’FC1, e si tratta di un esercizio.
Nella realtà la comparazione di quota è effettuata tramite interrupt nell’HSC modificando le sue proprietà nell’hardware. -> Encoder con Touch e quota stop su IP ciclico.
scarica il databook dell’encoder Encoder_databook
Acquisizione encoder e visualizzazione su bargraph.
Questo programma è stato realizzato alla lezione del 3 Marzo 2018 presso il laboratorio della G-Tronic Robotics, docente Marco Gottardo e discenti Marco Dal Zotto e Nardello Thomas. L’encoder usato è il modello delle esperienze precedenti Encoder_databook.
IL sistema si compone di due PLC 1212C AC/DC/Rly e un HMI KTP400basic posti in rete profinet.
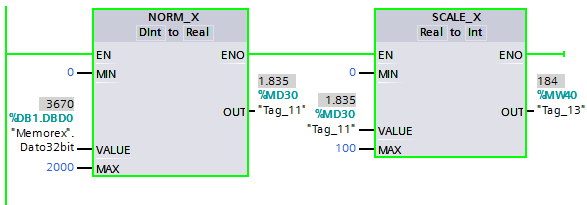
Il programma realizza: Acquisizione dell’encoder nel PLC numero 1, scalatura e normalizzazione tramite un FB scritto in SCL che implementa la funzione y=mx+q , Ricevitore del dato normalizzato nel PLC 2 tramite comando GET di profinet, accensione e spegnimento di 6 pilot lights a seconda del range del dato compreso tra 0.0 e 100.0
scarica il programma per studiarlo e testarlo -> EncoderBarGraph
Versione del programma precedente sviluppato da Nardello Thomas.
Scarica il programma completo in pdf ►Encoder_Via_Profinet
scarica il programma completo archiviato per TIA V14 ►Encoder_Via_Profinet
Programmazione Servomotore per valvola modulante controllata da encoder.
L’encoder dell’esempio precedente viene ora impiegato come manopola per posizionare una valvola modulante. L’angolo eseguito manualmente dall’operatore, viene riprodotto da un motore passo che controlla la serranda della valvola di modulazione del flusso. Il motore stepper, bipolare, compie un giro ogni 100 impulsi ovvero ogni 25 matrici di passo intero. L’interfaccia è un doppio ponte H a transistor il cui schema elettrico è presente nel testo Esercizi di programmazione di PLC. L’encoder ha invece una risoluzione di 2000 impulsi al giro quindi è necessaria una normalizzazione eseguito da una funzione di scala come mostrato nell’esempio. Esistono due contatori, il primo scandisce la matrice di passo 0->3, mentre il secondo riceve come preset il valore dall’HSC. Questo è settato come nell’esempio precedente. L’oscillatore è stato impostato a una velocità opportuna affinchè l’esercizio sia realizzabile anche se siamo in possesso di un PLC 1212C AC/DC/RELE, ovvero con le uscite elettromeccaniche. Vedrete comunque un movimento dello stepper stupefacentemente fluido e non troppo lento. Invertendo il movimento della manopola di controllo anche lo stepper inverte il senso di movimento, riducendo la portata del fluido nelle eventuali condotte.
download programma completo TIA V14 -> Encoder_Valvola_Modulante
Seconda versione TIA V14 -> Servovalvola_2
https://www.youtube.com/watch?v=gHGmcHKJZWo&feature=share
scarica pacchetto programma per TIA V14 e documento stampabile ->Servovalvola_2
Scarica una seconda versione TIA V15 -> Controllo valvola con encoder_1_20200305_1150
Encoder comanda decoder software via profinet (gruppo valvole remoto).
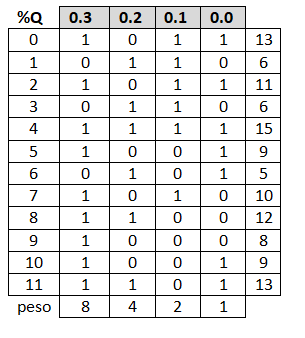
Il sistema si compone di due PLC, il primo acquisisce l’encoder, quindi ne viene abilitato l’HSC, e si cura della trasmissione via Profinet al PLC remoto. Il PLC remoto contiene una rete di decodifica che pilota un gruppo di quattro valvole in funzione della tabella qui riportata.
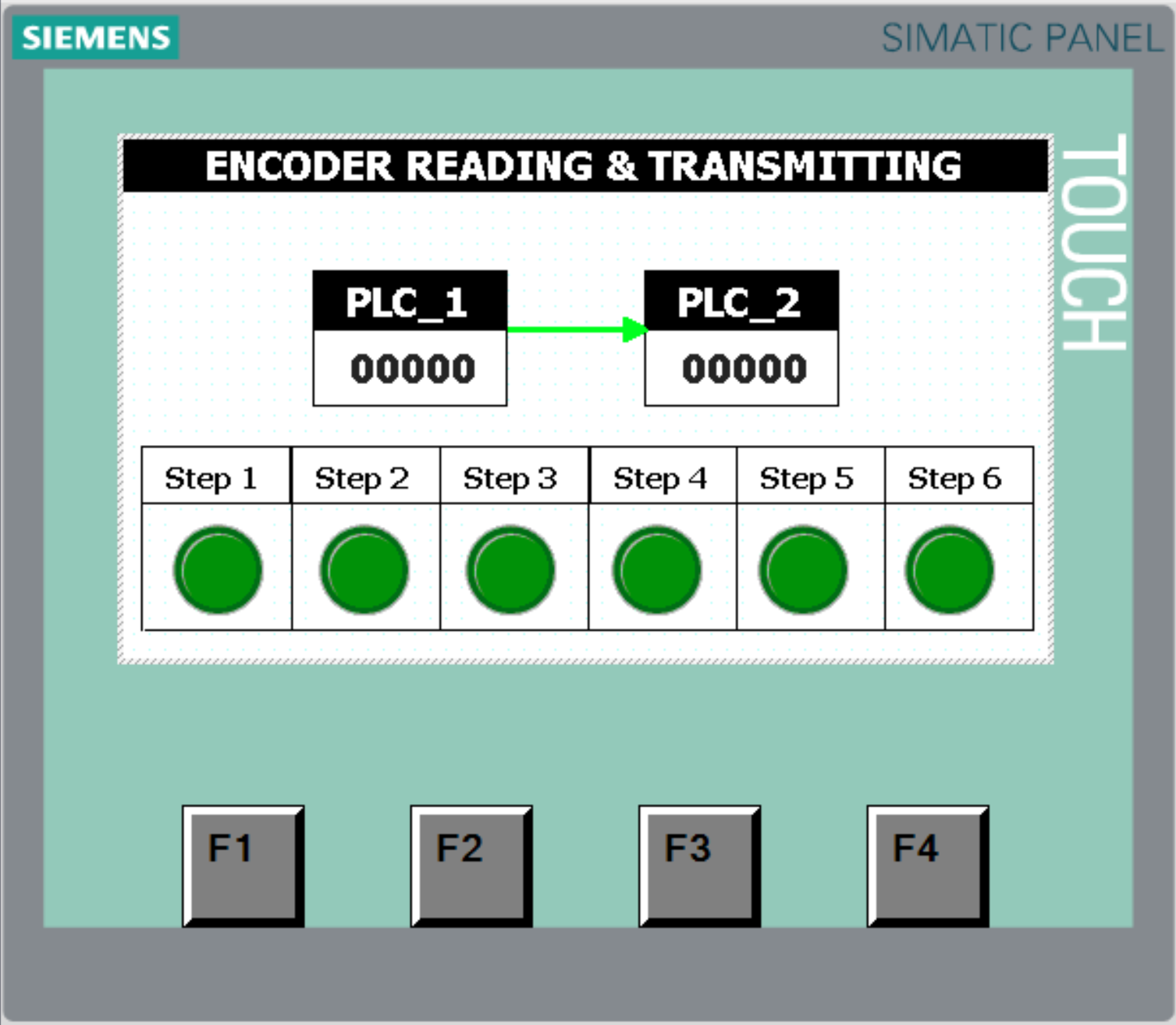
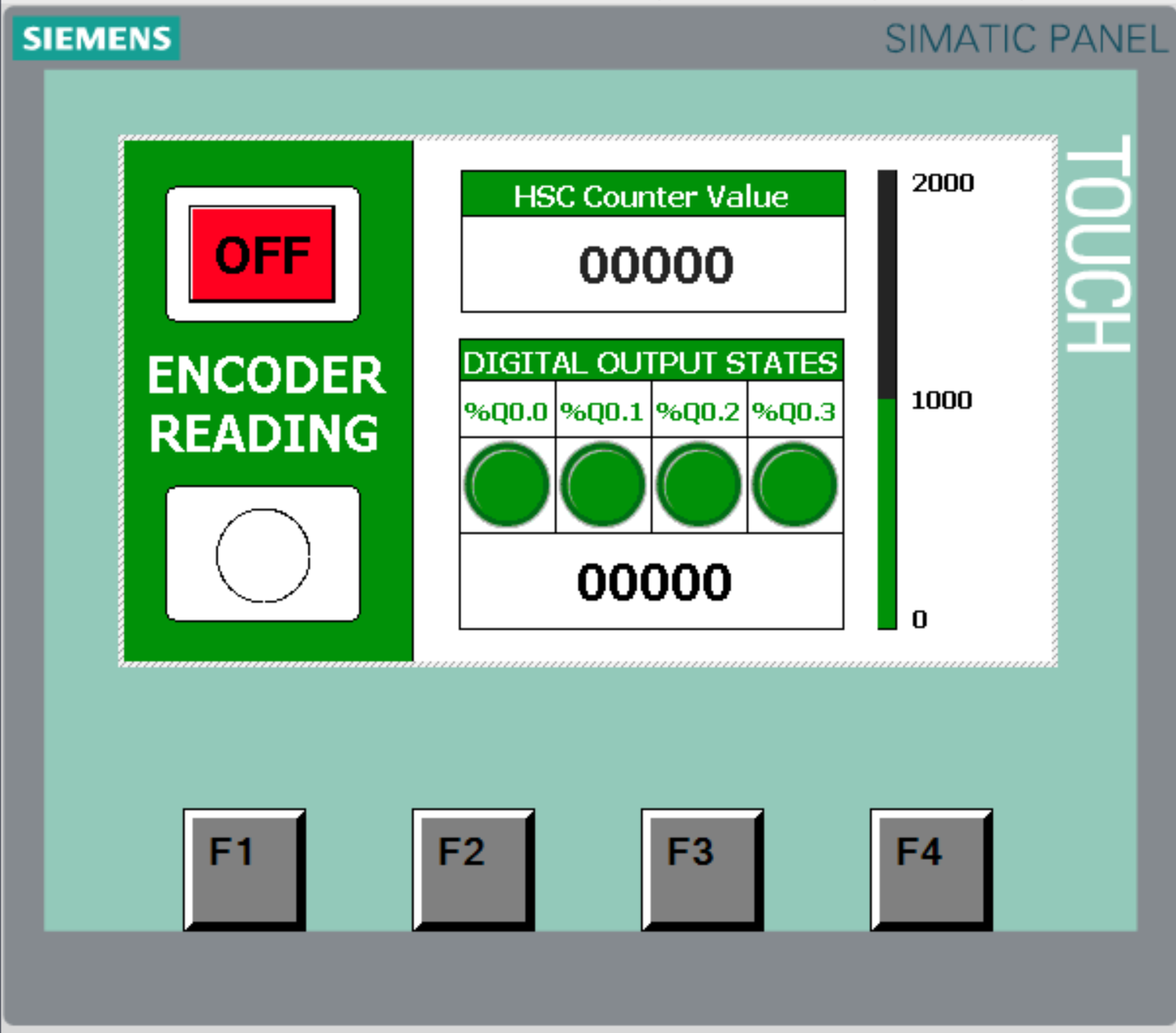
il pannello operatore viene progettato con questa grafica:
Scarica il programma completo per TIA V14. -> ES23_Sequencer_Controllo_Encoder
Animazione pantografo
Utilizza encoder e animazione orizzontale.
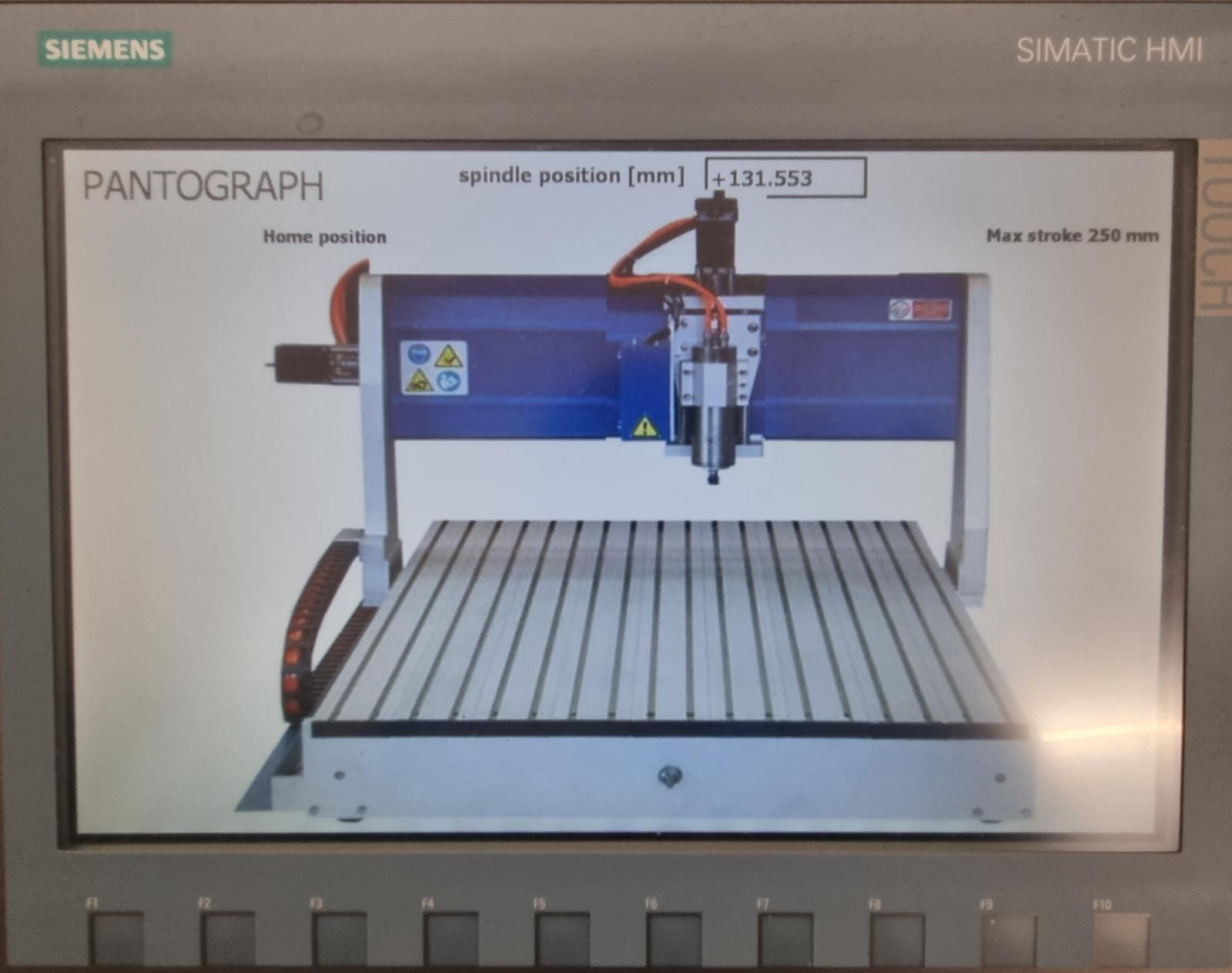
Vai alla pagina della spiegazione dettagliata e download programma
Encoder PROFIBUS modello TR-ECE-TI-D-0017
Questo modello di encoder è piuttosto datato ma ne è molto utile la comprensione e lo studio, infatti molti modelli recenti funzionano allo stesso modo.
Nell’esempio qui riportato l’encoder è collegato a una CPU S7-300 modello 314 2-DP impostata come master del bus PROFIBUS, mentre l’encoder è impostato da slave.
Scarica il pdf del databook dell’encoder Assoluto Profinet.manuale encoder tr profibus
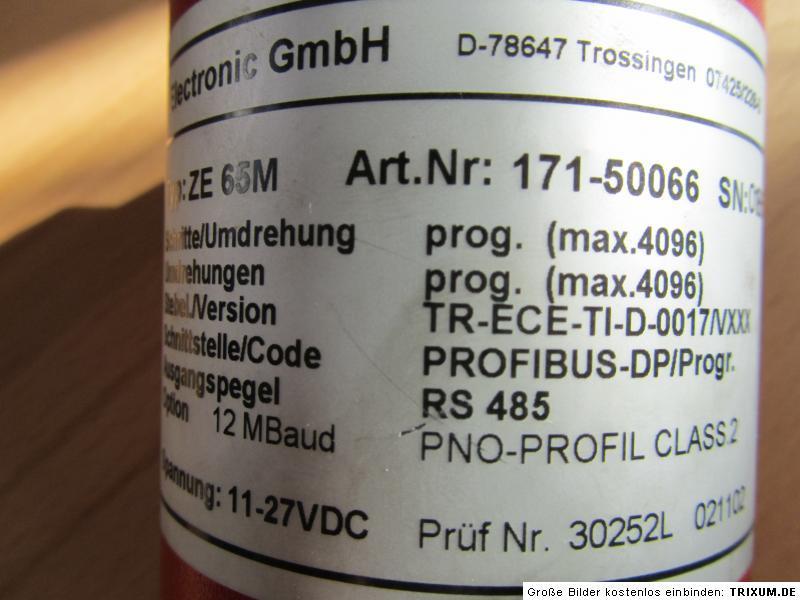
L’encoder ha tre connettori circolari, uno per l’alimentazione a +24V DC, up per il cavo viola PROFINET in ingresso e un per lo stesso cavo in uscita.

Per inserire il dispositivo nella vista di rete bisogna istallare i GSD files scaricabili da questo link: GSD TR-ECE
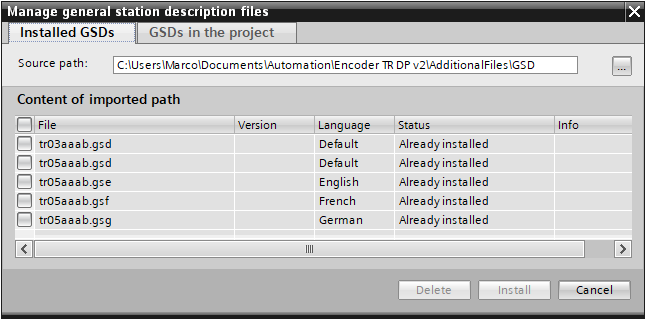
Installiamo i GSD in questa maniera:
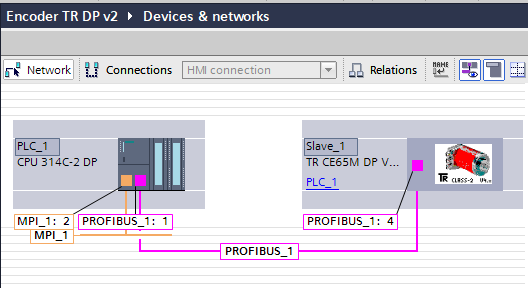
Associamo il numero di nodo e le tipologie Master e slave nei device, successivamente si mette il telegramma di comunicazione nello slot, come da immagini.
Nella vista del dispositivo -> proprietà … inseriamo il telegramma quindi diventano accessibili gli indirizzi.
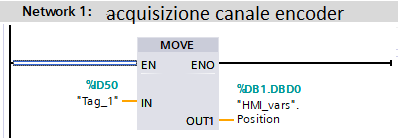
Questo Telegramma mostra la posizione raggiunta dall’encoder su ID50, come mostrato sotto:

il segmento che legge la double int è questa: