
How to control a stepper motor.
The simplest and cheapest solution for the movement of stepper motors, used as fake brushless, in semi-professional applications, consists of the Nema driver motor kits.
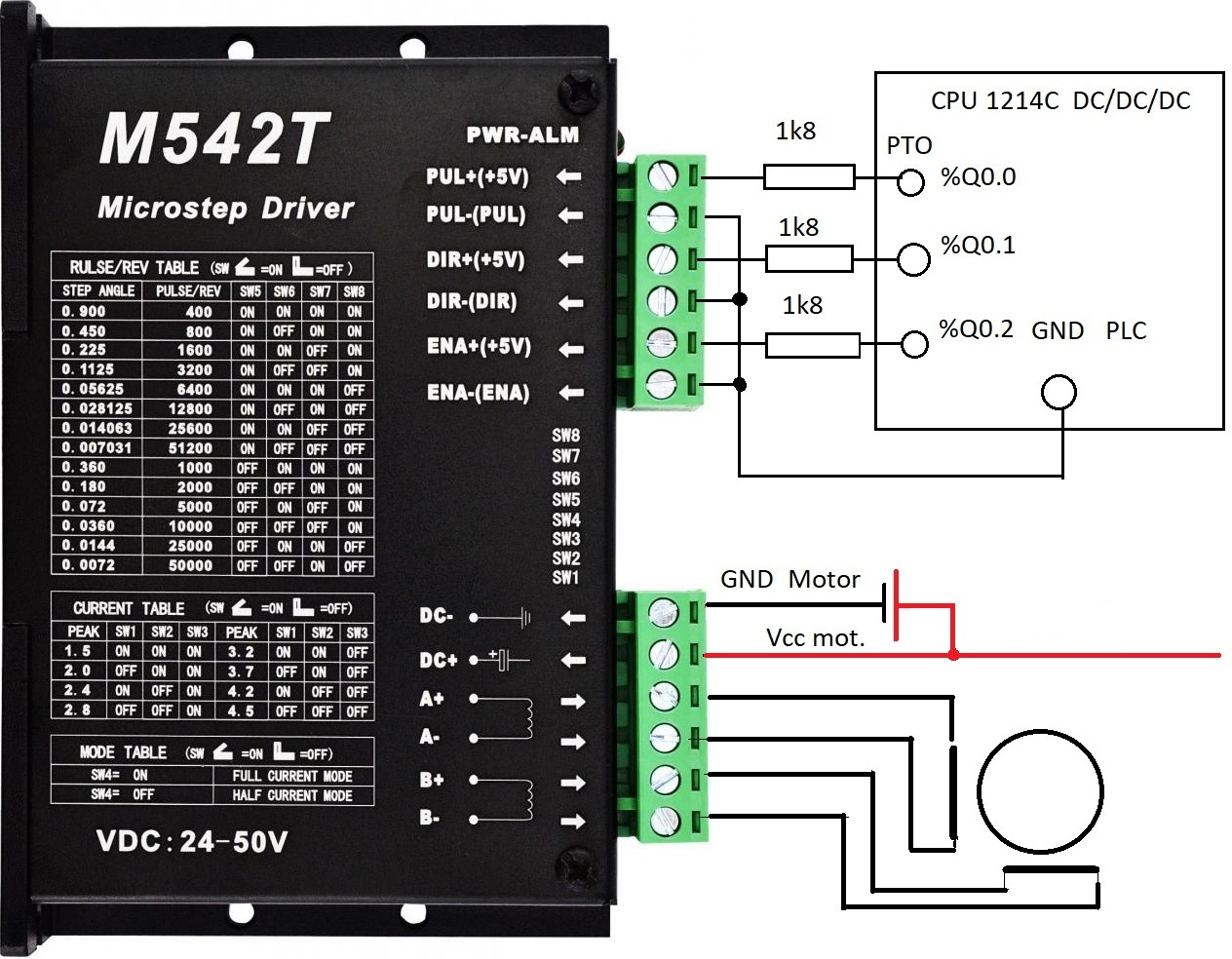
Un motore stepper bipolare con alimentazioen a 24V DC per bobina e 200 impulsi ala giro è pilotato tramite il drive M542T. Le velocità sono memorizzate in un Array, con valori preimpostati ma facilmente modificabili tramite una nuova pagina in HMI.
La pressione di un pulsante accelera il motore stepper puntando al successivo campo dell’array
Quando vengono superati i margini dell’array l’indice viene automaticamente resettato.
Dowload full project ZAP17 -> Stepper_control_by_array
Comandare il drive M542T con comandi Motion Control.
In questo esempio viene pilotato il motore stepper collegato al PLC tramite un drive economico modello M542T, oppure uno qualunque equivalente, che si possa azionare con i tre comandi canonici, PULS ( a cui collegare il PTO generato in questo caso con motion control), il segnale DIR e il segnale ENA.
scarica il programma che usa i comandi MC
How to control DC motor speed using PWM in S7-1200
These program set up the PWM output in the CPU 1214C DC/DC/DC AG40, V4.4.

A belt conveyor speed is controlled by user program using I/O field in KTP basic panel. A solid state rele is necessary, like shown in pictures.
controllo velocita pwm_20200929_1404
PWM control (inserire la velocità in percentuale da HMI e fare start/stop)
Controllo PWM con segnale analogico
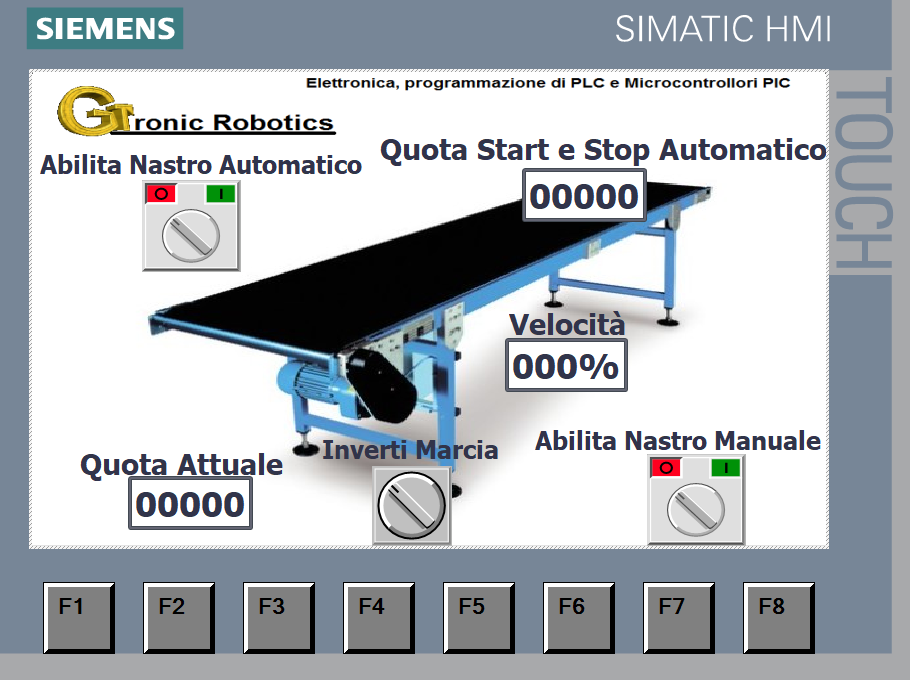
Il modellino di un nastro trasportatore è mosso da un motore DC ad eccitazione a magnete permanente, con indotto alimentato a 12V. L’interfaccia HMI è mostrata nell’immagine:
Upgrade dello stesso nastro trasportatore precedente
download Pwm analog
L’encoder, acquisito in maniera incrementale agli ingressi %I0.0 e %I0.1, fornisce impulsi di conteggio all’indirizzo ID1000 allo scopo di eseguire una sequenza di avanti e indietro. Nella finestra di dialogo “Velocità” viene mostrato il valore analogico acquisito da un potenziometro collegato all’ingresso analogico %IW64, dopo una scalatura che lo porta a 0–100%. Se posto in manuale il selettore rotativo decide il verso di marcia, mentre la finestra quota attuale mostra la posizione indicata dall’encoder.
Scarica versione testata il 26 maggio 2022 PWM 27 maggio 2022
Vedi il video su youtube https://youtu.be/IlHXGXNQiFY
PWM versione testata con TIA V19 15 maggio 2024
Il nastro trasportatore è equipaggiato con un encoder incrementale di tipo open collector, 600PR. Le versioni open collector vengono collegate agli ingressi digitali HSC del PLC tramite due resistenze di PullUp, per fase A e B, del valore di 2k2.
E’ possibile utilizzare la scheda G-Tronic modello PWM power inverter per eseguire le inversioni e il controllo della velocità tramite il MOSFET integrato.
La scheda è ordinabile al costo di 20€ e può essere inviata tramite posta tradizionale.
L’algoritmo, dopo il comando di start, porta un oggetto da inizio a 50% della corsa in avanti. Qui si attendono 4 secondi, si esegue l’inversione fino a inizio nastro, si attendono altri 4 secondi, si riavvia il nastro in avanti fino a trasportare l’oggetto al 100% della lunghezza.
Scarica il programma PWM per TIA V19 testato 15 maggio 2024.
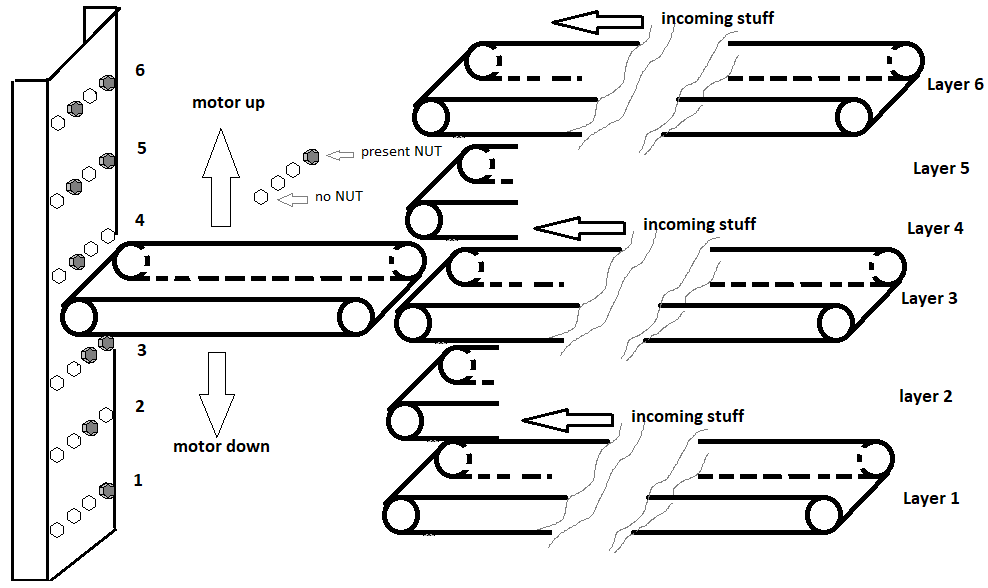
Under the moving belt, 4 proximity sensors are mounted which carry out the BDC code. On the front fixed part the threaded holes house the bolt to make a logical one, they do not have the bolt for the logical zero. it is necessary to use four digital inputs of the PLC to code the BCD for alignment with the unloading plane. Download the program from the link below to get the solution.