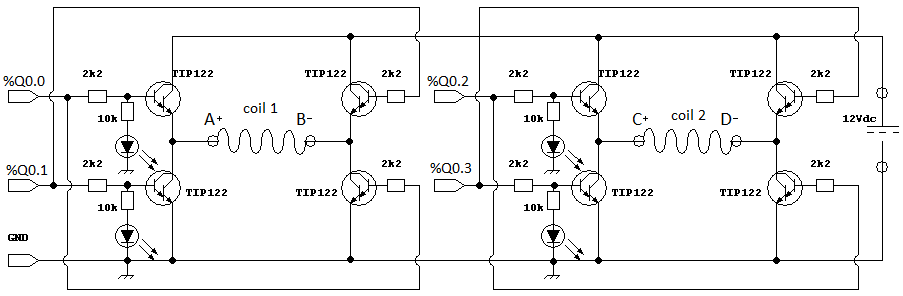
Un motore stepper bipolare può essere controllato con una semplice interfaccia auto costruita usando dei transistor Darlinghton, NPN di tipo TIP122.
Questi transistor configurano due ponti H e le basi di ciascuno sono pilotate tramite resistenze da 2k2 Ohm.
I led di segnalazione saranno molto utili durante la fase di programmazione.
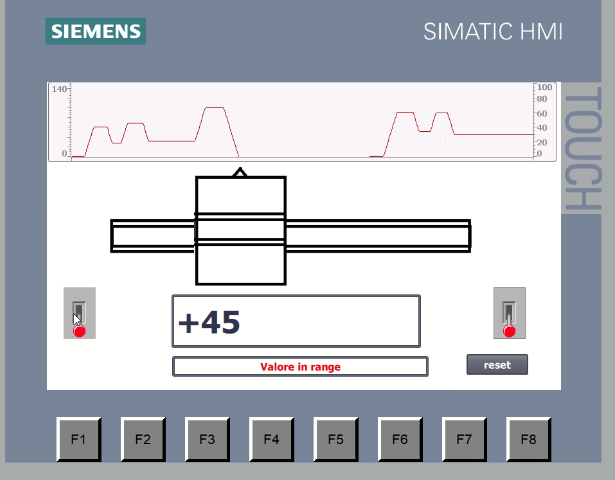
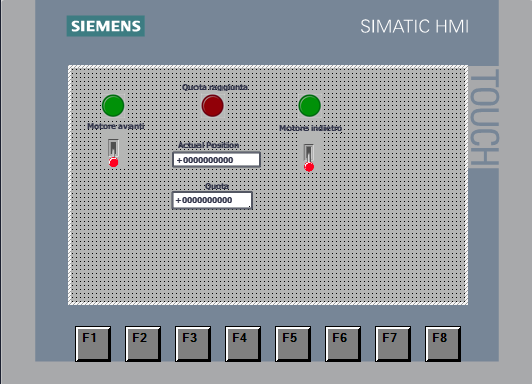
Il progetto si compone di una lista di testo che esprime se la parte mobile “chiocciola” si trova nel range ammesso pari a 150mm.
La chiocciola, sovrapposta all’immagine fissa della vite senza fine, è configurata come animazione orizzontale, le cui coordinate di movimento sono visibili nelle proprietà dell’animazione stessa.
Il progetto accetta i comandi di avanti e indietro sia dal bordo macchina FW=%I0.0 e RW=%I0.1 che dalle levette mostrate sui lati destro e sinistro dell’area grafica del touch.
Il pulsante di reset forza lo zero nella quota raggiunta e di conseguenza la chiocciola torna subito sul lato sinistro, ovvero a 0mm home.
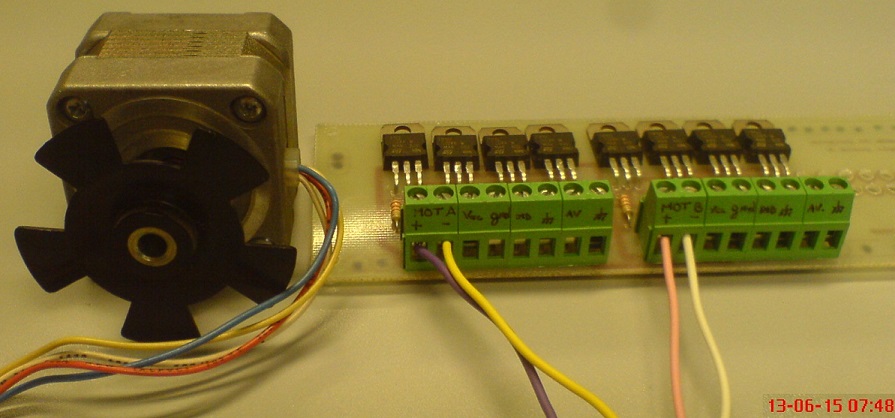
I motori detti ‘STEP’ o ‘STEPPER’, in italiano, motori ‘PASSO-PASSO’ vengono impiegati per azionamenti di precisione come macchine a controllo numerico, stampanti, pantografi, frese, distributori automatici e molto altro.
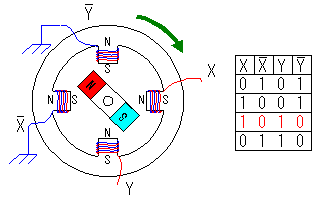
Anche se il disegno è molto semplificato, si può notare come il movimento sia generato modificando la polarità degli avvolgimenti statorici.
Per tale motivo i lati degli avvolgimenti vengono marcati come A e A negato e B e B negato (nell’esempio usa X e Y ma è lo stesso).
Creiamo una tabella dove inseriamo sulle colonne i nomi degli avvolgimenti e mettiamo il numero ‘1’ dove viene collegata la +Vcc, per questo motore +5Vdc, e zero dove colleghiamo la massa, è facile intuire come il motore possa venire pilotato dalla ripetizione di una ‘MATRICE BINARIA’ (la tabella in figura è esplicativa ed è nota come matrice ‘fullstep’, in italiano ‘matrice di passo intero’).
Si noti come questa sia ottenuta cambiando di riga in riga la polarità di un solo indotto (bobina statorica).
Se tra una transizione e l’altra inseriamo la situazione di bobina spenta le righe diventano 8 e la matrice assume il nome di ‘matrice half step’, in italiano ‘matrice di mezzo passo’).
La velocità di ripetizione alla morsettiera della matrice di passo regola la velocità del motore, nel nostro esempio manderemo alle uscite del PLC i numeri 9,5,6,10 che in binario sono:
- 9 = 1001 -> passo 1
- 5 = 0101 -> passo 2
- 6 = 0110 -> passo 3
- 10= 1010 -> passo 4
Visualizza il video della spiegazione su youtube
Scarica il programma realizzato con TIA V17, CPU 1214 DC/DC/DC con KTP700 basic
Pantografo a 2 assi piu mandrino
Questo programma esegue un foro quadrato su una latra di legno, ad esempio una porta a cui si vuole applicare una finestrella.
Lez8_AsseX_AsseY_Pantografo_1214_firmware44 0/02/2023
Versione semplificata del programma stepper motor
La levetta di sinistra mette in marcia avanti il motore fino alla quota inserita sull’apposito campo numerico. La levetta di destra porta indietro la corsa effettuata.
 Download stepper motor semplificato stepper motor
Download stepper motor semplificato stepper motor
Scarica il programma in formato pdf -> steppermotor pdf
bibliografia