 |
Robovie-M |
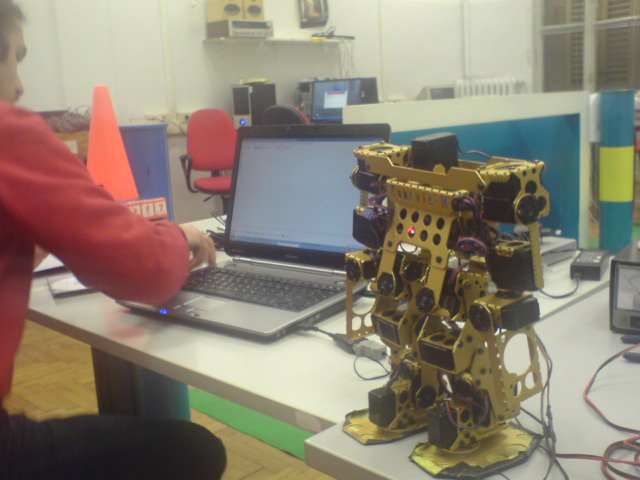
Riparazione dell'umanoide università di Palermo
Articoli scientifici in tema di robotica industriale, robotica umanoide, protesi intelligenti.
Riparazione ed assemblaggio di un robot umanoide modello Robovie-M della Vistone su commissione del dipartimento di ingegneria elettrica dell'università di Palermo.
Tecnici impegnati:
- ing. Alejandro Gatto
- dott. Marco Gottardo
data: 08/12/2008
locazione: Laboratorio IAS-LAB
Alimentazione:
fornita tramite alimentatore Kert regolato a 7 volt D.C. con visualizzazione dell'assorbimento in ampere.
Assorbimento in standby:
circa 8,5 Watt, (alimentazione 7 V.dc con assorbimento circa 1,2 ampere)
Assorbimento medio (l'automa si regge sulle gambe con servo in coppia):
circa 17 watt, (alimentazione a 7 volt dc con assorbimento 2,5 ampere)
Assorbimento sotto sforzo meccanico
sono stati rilevati picchi oltre i 5 ampere quindi oltre i 35 watt e il robot va in standby
Difetti segnalati:
- Il robot a volte non si accende
- il robot a volte si spegne entrando in protezione
- il robot si avvia in maniera posizionandosi in maniera innaturale.
- il robot ha dei cavi di collegamento rosicchiati (sbucciati e fanno corto con lo chassy)
- il robot ha dei servomotori apparentemente danneggiati.
step 1)
IL robovie è stato completamente smontato e sono stati sostituiti i due servomotori delle anche, l'anomalia rilevata come malfunzionamento dei servo era dovuta a cortocircuiti verso massa delle alimentazioni dei servomotori attraverso le sbucciatura degli isolamenti dei cavetti di connessione. Le sbucciature erano state causate da pizzicature dei cavi tra le articolazioni durante i movimenti.
.JPG)
step 2)
Sono stati controllati i punti di "zero macchina", ovvero le posizioni assunte dal robot in fase di boot. le ginocchia sono risultate fortemente scalibrate, quindi il file di configurazione le portava a fine corsa forzato causando un assorbimento di extra corrente. Questa extra corrente (oltre i 4 ampere) causava causava il surriscaldamento dei servomotori alle articolazioni delle ginocchia che portavano allo shutdown termico il sistema (spegnimento dell'automa). Abbiamo risolto semplicemente smontando l'articolazione e rilocandola in modo che tutta la corsa potesse avvenire piegando l'arto all'indietro come del resto avviene nelle ginocchia umane. Una cosa molto importante è stato il corretto riallaciamento al canale di controllo, infatti le ginocchia risultavano incrociate.
Testando la risposta dell'automa con il software "Cstage" ci si è accorti che pilotando l'arto sinistro si aveva un effettivo movimento nel destro e viceversa. Abbiamo quindi provveduto al corretto collegamento dei servomotori.
.JPG)
step 3)
La scheda di controllo è stata controllata e ripulita da residui di colla dovuta al fissaggio con nastro adesivo.
Abbiamo provveduto ad impedire percorsi dei cavi soggetti a cesoiatura durante il normale funzionamento.
step 4)
Fase di test e collaudo, ovvero l'automa è stato acceso e posizionato in posizione leggermente schienata (inclinato all'indietro) come visibile nel filmino del test finale. Si è mantenuta questa posizione per un lungo periodo, oltre mezzora. Alla fine di questa fase i servomotori erano freddi nonostante un assorbimento costante di circa un ampere e mezzo necessario a mantenere in coppia i servomotori delle gambe in particolare modo le ginocchia.
il test si può considerare concluso con esito positivo.
sono disponibili i filmini delle fasi di riparazione e collaudo del robovie-M, scaricabili dai link sottostanti:
dott. Gottardo Marco.