|
Let's go PIC !!! Il ponte H integrato Articolo pubblicato su www.grix.it
|
|

Let's GO PIC !!!
utilizziamo il ponte H.
In questo quinto episodio del corso online Let's
GO PIC, useremo una delle parti hardware che maggiormente distingue la
piattaforma Micro-GT PIC versatile IDE da tutte le altre disponibili in
commercio, ovvero le interfacce di potenza in grado di pilotare direttamente gli
attuatori a bordo macchina.
Nella scheda Micro-GT sono integrati due tipi di interfaccia di potenza, una specifica per i motori DC con indotto a spazzole collettore e magnete permanente (si veda il mio tutorial edito su grix sui motori in continua) ovvero un ponte H, e uno specifico per i motori stepper di cui approfondiremo in un successivo tutorial costituito dal famoso integrato L298.
Vengono presentati un paio di esempi sulla funzionalita'. Per essere sintetici alcune spiegazioni sono chiarite rinviando il lettore a un video pubblicato su youtube.
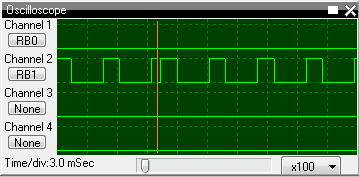
E' dovuto l'importantissimo avviso che il ponte in questione non e' protetto (per scelta logica costruttiva) dai comandi conflittuanti di marcia avanti e marcia indietro contemporanei, quindi e' fondamentale impedire, via software, il loro avvento.
Le azioni di test dei software vanno quindi testate con ponte disabilitato, ovvero con l'alimentazione di potenza esterna spenta e verificando l'effetto del programma sui led del PORTB in cui RB0 e RB1 non devono mai risultare simultaneamente attivi.
Un chiarimento su questa questione lo possiamo trovare nel filmato dimostrativo caricato su youtube e accessibile all'indirizzo:
http://www.youtube.com/watch?v=_IJvDYvfCVA
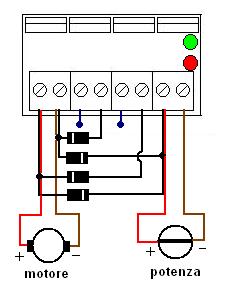
Passiamo alla descrizione hardware circuitale con una rapida analisi dello schema sottoriportato.
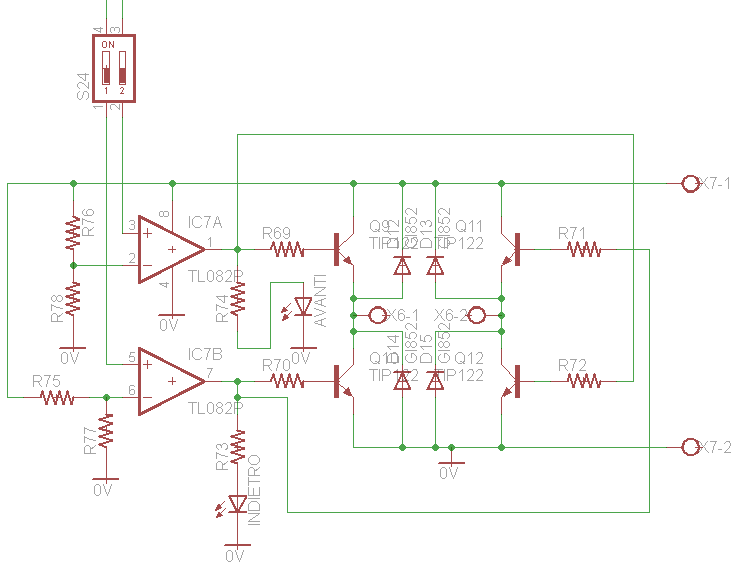
Lo schema si compone di due parti:
- La sezione ponte H (per l'inversione della corrente sul carico), parte destra.
- La sezione driver, parte sinistra.
La sezione driver ha lo scopo di adattare i livelli TTL di comando ai valori più idonei, tra i 12 volt e i 24 volt. Questo trucchetto rende piu stabile la saturazione degli elementi attivi, in modo particolare dei due posti in alto, che si troverebbere a dover essere pilotati con un segnale in base troppo basso rispetto alla caduta causata dall'indotto del motore che si viene a provare in emettitore. Benchè non sia propio questo il motivo percui spesso queste configurazioni vengono realizzate con due NPN e due PNP, questa soluzione gestisce in parte il problema della bassa tensione di comando.
I due amplificatori operazionali, collegati in catena aperta, operano da comparatori, eseguono quindi una impostazione dell'uscita a valori prossimi (a meno delle cadute interne pari a circa 1,4 volt) alla tensione di alimentazione presente ai morsetti X7-1 (positiva) e X7-2 (massa) corrispondente ai dati di targa del motore. I darlighton Q9 e Q11 sono quindi in grado di saturare.
Affinchè il circuito presenti una buona stabilità è bene che le tensioni di riferimento presenti ai morsetti invertenti (pin 2 e pin 6), siano stabili e possibilmente indipendenti dalla tensione di alimentazione del motore. A tal scopo, è importante eseguire una piccola variazione circuitale, rispetto allo schema sovrastante, che non richiede una variazione topologica (modifica di piste), ma solo del componente installato.
Sostituiamo le resistenze R77 e R78 con due zener di un valore intermedio rispetto alla tensione TTL della logica di comando, ad esempio 2,7V.
Con questa piccola modifica l'ingresso invertente dei due comparatori è fissato alla tensione di zener, e quindi l'uscita in mancanza di comando è forzata bassa.
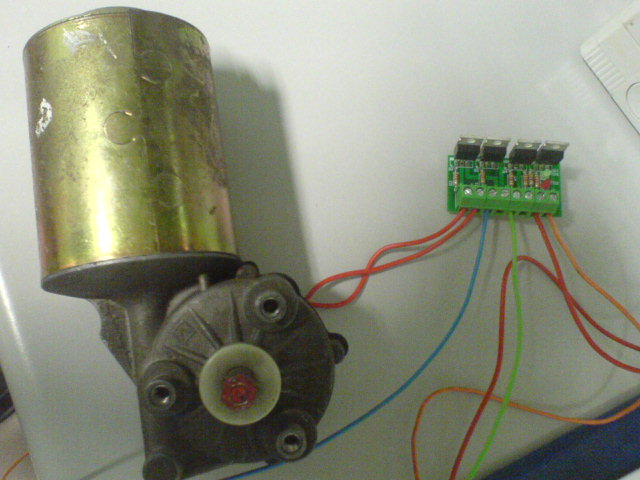
Nella foto notiamo i due zener, di colore azzurro, posti proprio davanti all'amplificatore operazionale.
Durante alcune prove e collaudi alcuni TL082 hanno dato dei malfunzionamenti, evidenziando una scarsa attitudine degli ingresso a JFet al funzionamento come comparatori, difatti questi integrati sono più idonei in applicazioni audio. Sostituiamoli con un più comune, economico, efficiente, moderno LM358. La manovra sarà semplice dato che tutte le Micro-GT distribuite montano queto integrato su zoccolo e la piedinatura è coincidente.
In fase di progettazione ho trascurato una questione operativa, ovvero la necessità di segnalare la direzione di marcia in presenza di segnale di comando e in mancanza di alimentazione di potenza ai morsetti X7 1 e 2, infatti i due led si trovano all'uscita dei comparatori invece che all'ingresso. Sconsiglio di eseguire inutili modifiche al circuito perchè tale segnali luminosi li ritroviamo duplicati nella fila di LED rossi centrali abbinati al PORTB del processore di riferimento della Micro-GT .
Durante il
normale funzionamento, ovvero se avete eseguito corretamente la programmazione,
le due spie luminose assolvono perfettamente la loro funzione.
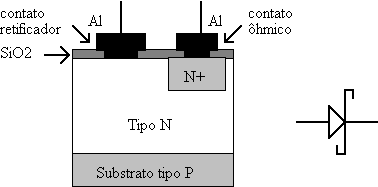
Analizziamo lo stadio di potenza che è rappresentato dalla nota configurazione a ponte H. La prima cosa che si nota è che per questioni grafiche (libreria standard di Eagle), gli switch (termine con cui a volte ci si riferisce sia ai transistor BJT o Darlighton che Moasfet quando usati in commutazione) sono disegnati come normali BJT. Riporto qui sotto la corretta simbologia, corrispondente alla configurazione interna dei due BJT che compongono il Darlinghton.
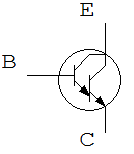
Come è chiaro dallo schema interno questo particolare transistor pur componendosi di due elementi si presenta esternamente con i medesimi terminali di uno singolo che continuano a chiamarsi Base, Collettore, Emettitore.
Ne ha vantaggio il guadagno complessivo di corrente che diventa l prodotto delle due hfe.
Si ottiene in questo modo un transistor che pur essendo per applicazioni di potenza è sufficientemente morbido in base da poter essere pilotato fino alla saturazione con pochi milliampere.
Nello specifico caso del TIP122, scelto per essere impiegato nel ponte integrato della Micro-GT la saturazione avviene con circa 10 mA.
Questo darlinghton si può definire un piccolo gioiello tecnologico, ha un elevato guadagno che lo rende pilotabile con corrente di base piuttosto basse e una corrente di collettore stazionaria in collettore di 5A e impulsiva fino a 8A, dati presi dal databook.
il funzionamento alla fine non si discosta da quello di un normale BJT, quindi esistono le tre zone canoniche di lavoro ed ovviamente non dimentichiamoci della normale rete di polarizzazione, che può essere ridotta a una unica resistenza di base che limita la corrente Ib al valore massimo utile per una corretta saturazione.
Vi ricordo che la Micro-GT è una tavoletta sperimentale, quindì, benchè predisposta per "andare in campo" si sconsiglia di utilizzarla collegata al bordo macchina ma di sviluppare il software per le prove al banco, e nel limite del dimensionamento anche usando il motore reale.
Generalmente, durante le prove al banco, il rotore viene tenuto libero, ovvero privo di coppia resistente, garantendo un funzionamento freddo degli elementi in commutazione. Per questa ragione non è stato montato alcun dissipatore ai darlighton. Evitate di montarli per non mettere in corto circuito il ponte H come si intuisce dall'analisi dello schema.
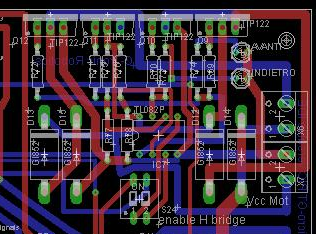
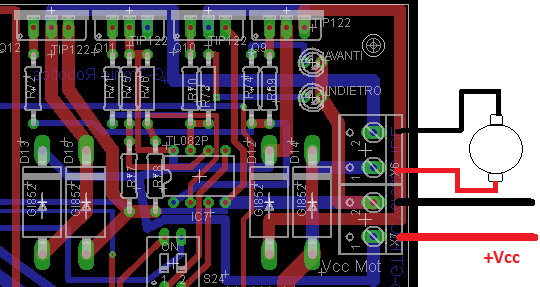
Sbroglio Eagle della sezione ponte H della Micro-GT PIC
Come si vede dall'immagine, i diodi posti in parallelo ad ogni elemento di commutazione sono piuttosto robusti, in effetti data la natura sperimentale della Micro-GT in molti casi possono essere omessi, specie quando il comando di marcia è dato in maniera continua e non inpulsiva come avviene nel controllo combinato del senso di marcia e della velocità.
In caso di difficoltà di reperimento dei diodi schottky GI851, che risultano essere un po datati, si può ripiegare in qualnque modello di diodo costruito con la stessa tecnologia "schottky" in grado di sopportare una corrente di almeno 2 ampere.
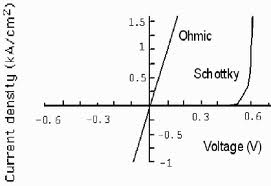
Citando wikipedia, il diodo Schottky è costituito da una giunzione metallo-semiconduttore invece che da una giunzione a seminconduttore e ha una zona di svuotamento nulla. Le sue principali caratteristiche sono:
- La tensione di soglia 0,35V invece di 0,6V
- Tempi di commutazione brevissimi
Nell'insieme del layout della Micro-GT il ponte H si trova nella posizione indicata con il rettangolo rosa.

posizione nel layout dell'H bridge.
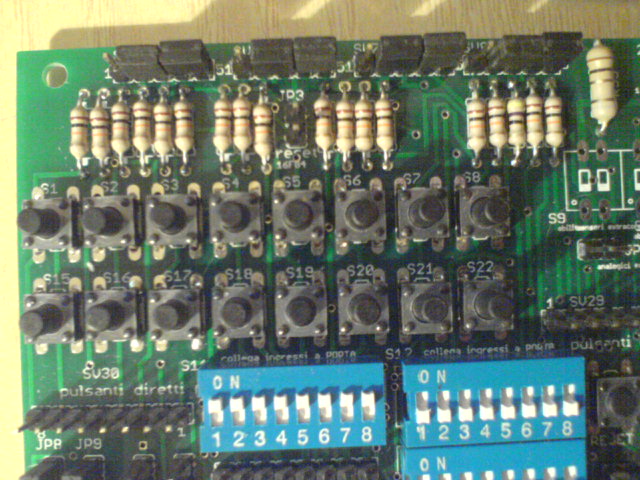
Il dip switch S24 a due vie ha lo scopo di isolare il ponte H dal bus dati del microcontrollore. Come possiamo facilmente verificare con lo schema alla mano, scaricabile dai precedenti episodi di "Let's go pic", i comandi avanti e indietro sono connessi ai pin 33 e 34 del processore di riferimento 16F877A, che corrispondono ai segnali RB0 e RB1 del PORTB.
I circuiti a ponte hanno lo scopo di creare e di dare la possibilità di sbilanciare a comando due punti equipotenziali in un circuito.
Considerati i morsetti del motore come i punti equipotenziali in questione, attraverso l'indotto del motore non fluisce corrente fino a che non avviene uno sbilancamento sia verso il ramo di destra che verso il ramo di sinistra consentendo un flusso di cariche "invertibile" nel ramo centrale. E' così possibile usare questa configurazione per invertire la marcia del motore D.C. ivi cablato.
Detto questo si intuisce che i 4 elementi attivi saranno pilotati secondo le diagonali, e che è assolutamente vietato pilotare i "totem" pena la distruzione della gamba del ponte.
Per impedire tale evento è opportuno inserire degli interblocchi sia hardware (non presnti in questa realizzazione) che software.
Operativamente:
- consento marcia avanti se non è presente marcia indietro.
- consento marcia indietro se non è presente la marcia avanti.
Dal punto di vista software si può procedere come segue:
if ((!avanti)&&(!indietro)){ //gestisce la condizione di fermo motore
PORTB=0b00000000;
}
if ((avanti) && (!indietro)){ //motore in marcia avanti se non sta andando indietro
PORTB=0b00000001;
}
if ((indietro) && (!avanti)){ //motore marcia indietro se non sta andando avanti
PORTB=0b00000010;
}
CMCON=0b00000111; //DISABILITA I COMPARATORI
CMCON=0b00000111; //DISABILITA I COMPARATORI
TRISA=0xFF;
TRISB=0;
PORTB=0b00000000;
TRISC=0;
TRISD=0;
TRISE=0;
Il controllo a modulazione dell'ampiezza dell'impulso, come sapete o come avete potuto modo di leggere sul link al tutorial di cui sopra, permette una variazione verso il basso (in calare) del numero di cori del rotore senza significativa perdita di coppia.
- Nel PWM il periodo è costante
- il periodo è l'inverso della frequenza e la sua unità di misura 1/s prende il nome di Hz.
- Una frequenza valida di funzionamento per molti piccoli attuatori DC con indotto a spazzole collettore è 12Khz
- bisogna prestare attenzione ale frequenze di risonanza dell'indotto e comunque tenersi fuori dalla frequenza, che spesso è attorno al Khz che fa emettere un fastidioso fischio al motore.
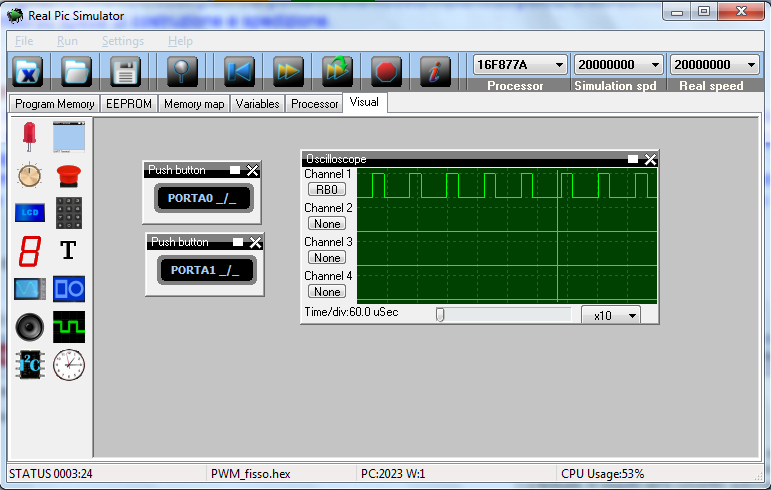
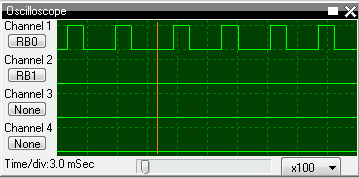
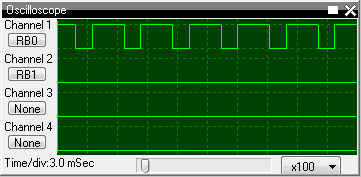
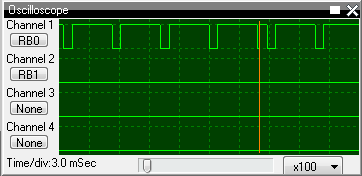
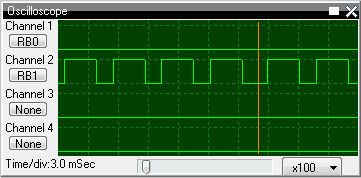
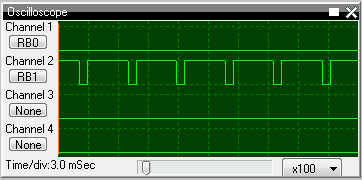
Creiamoci via software una oscillazione parzializzata a un terzo (duty cycle pari a 1/3, ovvero la parte attiva dell'onda rettangolare rispetto alla parte in cui il segnale è basso), usando per il momento le funzioni Delay.
Questo è possibile perchè nel primo esempio non siamo interessati a una regolazione della velocità, ma solo a una impostazione ridotta a un valore tarato, senza subire una significativa perdita di coppia motrice all'asse.
Consideriamo il classico programma di lampeggio del led costitito dai due comandi ON e OFF del pin intervallati con i due richiami della delay. Se questi due ritardi sono uguali si ottiene un'onda quadrata, ma se sono diversi degenera in un'onda rettangolare.
Per ottenere un'onda quadrata a 12Khz bisogna eseguire i seguenti semplici calcoli. Otteniamo il periodo da:
T=1/(12000) [s]
svolgendo il calcolo si ottiene T=8,3^(-5) ovvero T=0,000083 sec pari a 83 us (micro secondi).
Suddividiamo questo valore in un terzo e due terzi come richiesto dalle specifiche del problema.
- 1/3 ON -> 27us
- 2/3 OFF -> 56us
Possiamo quindi impostare le nostre enanced delay con i tempi:
- DelayUs(27); //tempo di attivazione "duty cycle"
- DelayUs(56); //tempo di latenza
Per i colleghi "programmatori di PLC" dotiamo il nostro piccolo programma di un comandi autoritenuti.
La logica funzionale, o ladder, è ben nota ed è quella nell'immagine:
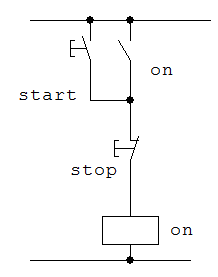
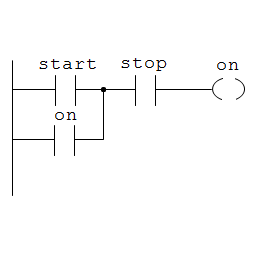
L'autoritenuta è un comando con memoria di un evento impulsivo che genericamente può trovare "appoggio" su un a variabile interna del sistema di controllo. L'evento viene "dimenticato" agendo su un comando detto di sgancio dell'autoritenuta.
Agli albori dell'automazione implementata con PLC il primo problema che si riscontrava era la scelta dello stato del contato di sgancio in funzione del cablaggio in campo. Questo ha sempre causato frequenti errori. Già vent'anni or sono scrissi una dispensa in cui fornvo quella che avevo chiamato "la regola di Gottardo".
Un contatto che nel funzionale è delegato allo sgancio di un'autoritenuta viene acquisito nel software al contrario di come è cablato in campo .
La riga di programmazione C16 diventa quindi:
if ((start || on)) && (!stop)) { on = 1; }
Segue il codice sorgente del primo esempio.
* corso ZIP 16/02/2011 *
* imposta PWM con duty cycle fisso *
* G-tronic Robotic *
*************************************************/
#include "delay.h"
#include "setting.h"
#define stop RA1
char on=0;
settaggi();
if ((stop==1)){
on=0;
PORTB=0b00000000;
}
on=1;
}
if (on==1){
PORTB=0b00000001;
DelayUs(27);
PORTB=0b00000000;
DelayUs(56);
}
}
}
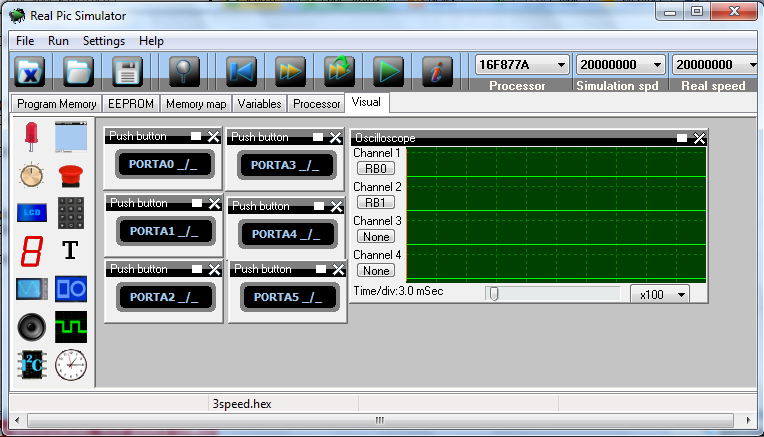
* www.grix.it 17/02/2011 *
* imposta 3 velocità PWM del motore DC *
* G-tronic Robotic *
***************************************************/
#include <pic.h>
#include <stdlib.h>
#include "setting.h"
#define av2_3 RA1
#define av3_3 RA2
#define ind1_3 RA3
#define ind2_3 RA4
#define ind3_3 RA5
__CONFIG (HS & WDTDIS & PWRTDIS & BORDIS & LVPDIS & DUNPROT & WRTEN & DEBUGDIS & UNPROTECT);
settaggi();
PORTB=0b00000000; //se non si preme alcun pulsante si forza a zero le uscite
if ((av1_3==1)&&(ind1_3==0)&&(ind2_3==0)&&(ind3_3==0)){
PORTB=0b00000001;
DelayMs(2);
PORTB=0b00000000;
DelayMs(4);
}
PORTB=0b00000001;
DelayMs(4);
PORTB=0b00000000;
DelayMs(2);
}
PORTB=0b00000001;
DelayMs(5);
PORTB=0b00000000;
DelayMs(1);
}
PORTB=0b00000010;
DelayMs(2);
PORTB=0b00000000;
DelayMs(4);
}
PORTB=0b00000010;
DelayMs(4);
PORTB=0b00000000;
DelayMs(2);
}
PORTB=0b00000010;
DelayMs(5);
PORTB=0b00000000;
DelayMs(1);
}
}
}
pace salute e serenità
Marco Gottardo as Ad.noctis
This opera is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 2.5 Italy License.
Appendice di fine pagina.
I diodi di ricircolo.
I diodi veloci sono usati in combinazione
con GTO, IGCT e IGBTs nella conversione da corrente continua in alternata (DC
in AC). Ogni elemento in commutazione rapida (GTO, IGCT or IGBT) necessita un
diodo complementare (per esempio diodo a ruota libera o di "freewheeling" per
potenza reattiva) per permettere l'uso del sistema di conversione DC-AC nel
caso di un carico induttivo.
I diodi veloci sono ottimizzati per sopportare alte sollecitazioni dinamiche
(transizione rapida dallo stato di conduzione allo stato di interdizione).
Hanno però, in generale, perdite di conduzione più elevate dei diodi di
raddrizzamento. Per ogni famiglia di elementi attivi di commutazione (GTO,
IGCT and IGBT), esistono diodi veloci specifici e ottimizzati.
Citando la fonte internet wikipedia:
---------------------------------------------------------------------------------------------------------------------------------------------
Il diodo Schottky è costituito da una giunzione metallo-semiconduttore invece che da una giunzione a semiconduttore e ha una zona di svuotamento nulla. Le sue principali caratteristiche sono:
- la tensione di soglia a 0,35 V invece di 0,6 V
- tempi di commutazione brevissimi.
--------------------------------------------------------------------------------------------------------------------------------------------
Riprendo dopo la citazione la mia esposizione dicendo che:
L'intervento dei diodi di ricircolo avviene durante la fase di interdizione in cui i carichi induttivi tenderebbero, per loro natura, a mantenere lo stato di flusso e quindi di corrente sul ramo interdetto, con il conseguente accumulo di cariche tra i morsetti dell'elemento di commutazione (in transistor o il mosfet). TAle accumulo spinge la tensione in maniera impulsiva verso livelli pericolosi per la giunzione stessa.
Creiamo dunque una strada diversa che "ricircoli" le cariche verso il serbatoio più ovvio ovvero il generatore.
I diodi schottky sono disponibili in varie misure ma tipicamente, nelle applicazioni elettroniche leggere con PWM su attuatori DC di piccola e media stazza (si veda il motore nella foto) vanno bene con correnti massime dai 2 ai 4 ampere.
Ecco il simbolo grafico del diodo schottky.

Ecco l'aspetto di alcuni modelli di diodi veloci adatti a funzionare come ricircolo.


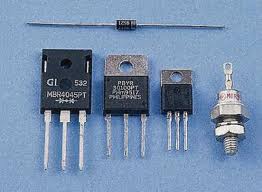
il seguente è uno dei modelli piu usati nelle piccole applicazioni:

BYV26B per applicazioni attorno ai due ampere.
.
Come procurarsi i circuiti stampati o esemplari
già montati.
Come noto la piattaforma su cui si basa il corso online "Let's GO PIC" è la
Micro-GT PIC versatile I.D.E.
Me ne rimangano a magazzino ancora diversi esemplari, chi fosse interessato ad attrezzarsi ha disponibili le seguenti opzioni.
- invio del solo PCB
- invio del solo PCB più i componenti per autocostrire l'oggetto (Kit di montaggio)
- Invio della Micro-GT modello base che può flaschare i PIC in seriale e simulare 8 ingressi e 8 uscite
- invio della Micro-GT completamente assemblata e testata.
Ecco le immagini relative a alcune delle varianti:
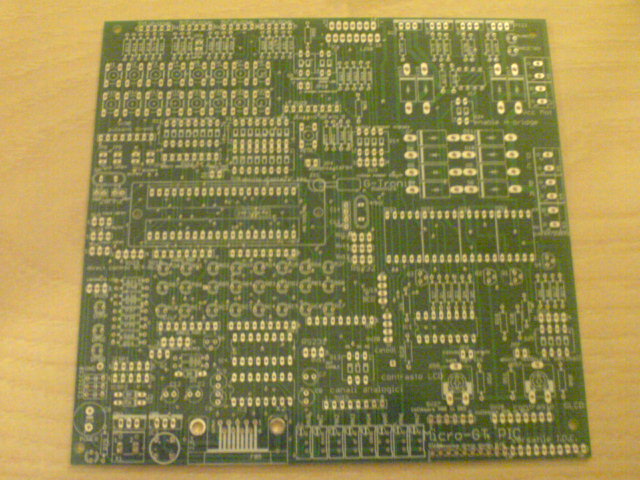
Micro-GT (disponibile opzione solo PCB)
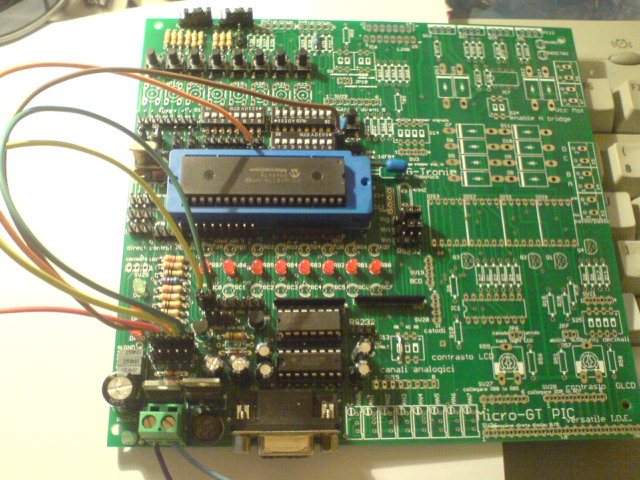
Micro-GT (disponibile modello base assemblato parzialmente come in figura)
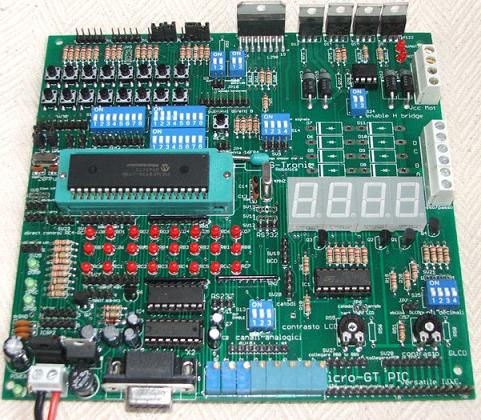
Micro-GT PIC versatile I.D.E. (assemblaggio completo e collaudo).
Chi fosse interessato ad avere uno di questi esemplari mi può contattare alla mia mail personale
Sono disponibili anche alcuni pannelli contenti 10 esemplari del ponte H visibile all'interno del tutorial, anche per questo PCB vale quanto detto sopra.
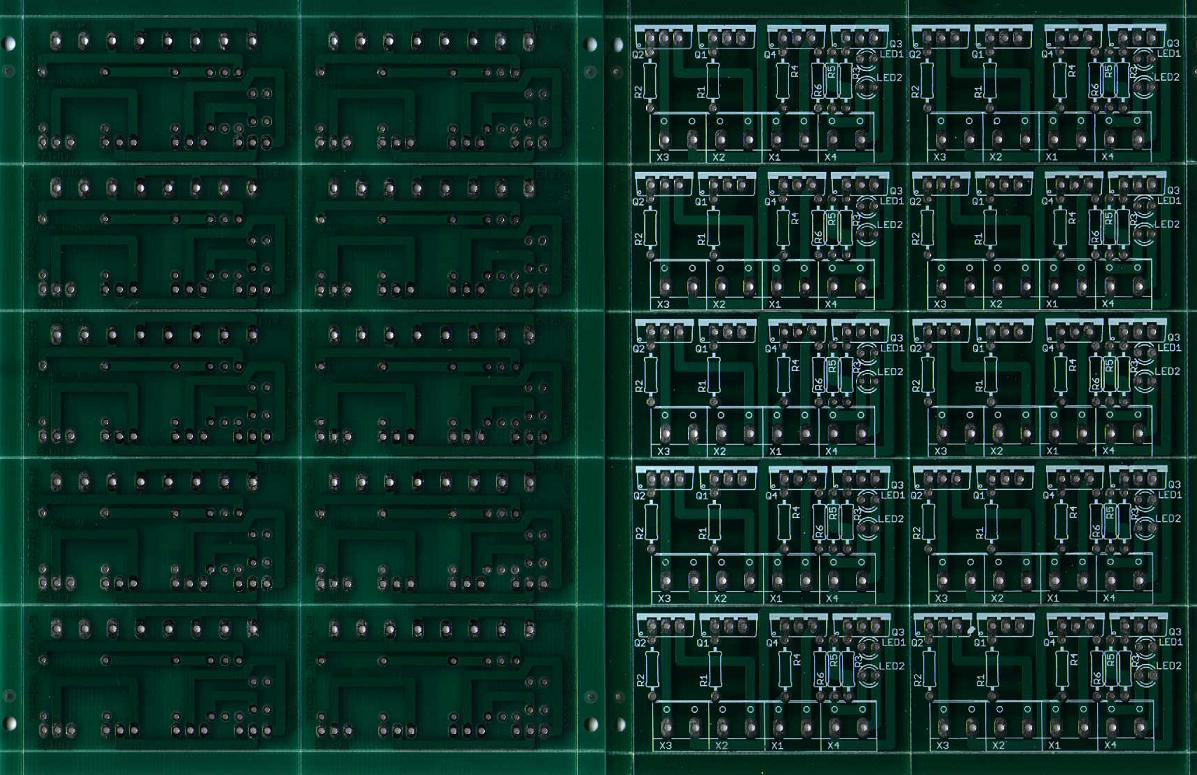
Ogni pannellino contine 10 esemplari, è possibile chiedere anche porzioni di pannello ma se possibile evitiamo il singolo esemplare.