 |
Macchine elettriche D.C.
articolo pubblicato
su www.grix.it |
 |
Macchine elettriche in continua.
Questo è un tutorial di taglio “medio alto” percui non spaventatevi se
alcune cose non saranno di immediata comprensione.Come di consueto cercherò
comunque di alleggerire la trattazione con ampie note di fondo pagina, un
completo glossario e spiegazioni di appendice.
Chi acquisirà questi concetti potrà ritenersi pronto ad affrontare una
discussione sul tema “macchine in continua” anche in sede d’esame presso una
qualsiasi facoltà di ingegneria.
Macchine elettriche in
generale.
Le macchine
elettriche si dividono in due grosse categorie, le statiche e le rotante. Le
statiche non hanno nessuna parte in movimento e per questo sono sempre ad
altissimo rendimento anche prossimo al 99%. In questa categoria troviamo i
trasformatori a cui, tempo permettendo, dedicherò un tutorial, e le macchine
rotanti suddivise a loro volta in un numero piuttosto elevato di sottofamiglie e
categorie.
Titolo Sezione
Le macchine rotanti sono, almeno grossolanamente
suddivise in:
- ·
Macchine sincrone (farò un tutorial dedicato).
- ·
Macchine asincrone (idem, farò un tutorial).
- ·
Macchine in continua (argomento di questo tutorial).
Le macchine in continua
sono a loro volta suddivise in una miriade di sottofamiglie le cui più famose
ed usate sono:
- ·
Macchine a collettore (suddivise in tre famiglie).
- ·
Macchine ad induzione (suddivise in almeno 2 famiglie).
- ·
Servomotori (molto applicati in robotica e modellismo).
Glossario.
Prima di continuare è
opportuno acquisire la nomenclatura e la terminologia necessaria. Vi assicuro
che molti troveranno illuminanti proprio queste righe in cui cercherò di
chiarire il significato di ogni singola “parolina” usata.
Campo: Il campo
potrà essere inteso come la regione di spazio in cui si sente l’influenza
della presenza di una grandezza fisica, spesso vettoriale, ma non solo. In
certi casi possiamo ad esempio parlare di campi di corrente, ed è noto che la
corrente non è una grandezza vettoriale bensì scalare (ovvero non è
caratterizzata simultaneamente da una intensità, una direzione e un verso). Un
campo vettoriale è caratterizzato dal fatto di essere permeato dalle “linee di
forza” della grandezza vettoriale in esame.
Linee di forza:
Sono le traiettorie che verrebbero seguite da una particella libera di
muoversi sensibile alla grandezza sotto esame. Ad esempio poche molecole
metalliche in prossimità di una calamita se lasciate libere di muoversi si
avvicinano alla calamita fino a trovare stabilità nel “polo”.
Polo (o poli):
Dal punto di vista teorico il punto di uscita o di rientro di una linea di
forza di un campo magnetico o di induzione. Ricordo a tale proposito che la
relazione esistente tra il campo magnetico H e il campo di induzione
B è il fattore moltiplicativo µ che corrisponde alla resistenza che impone
l’aria (quasi sempre si tratterà di traferro d’aria) al passaggio di una linea
di forza. I poli fisici di questo tutorial saranno invece i luoghi concreti in
cui vengono artificiosamente creati i campi di induzione basandoci sulla legge
della mano destra.
Salienti (o
salienze): Termine totalmente interscambiabile con “sporgente” o
“sporgenze”. I poli ti tipo saliente (sporgente) hanno solitamente la bobina
avvolta nella loro asta dell’espansione polare. Bobine cosi avvolte sono
chiamate in bibliografia “concentrate”. Nelle macchine in continua le
espansioni polari di tipo saliente sono statoriche.
Polarità: Nei
poli di espansione magnetica, ovvero i poli salienti che grazie alla bobina
avvolta in essi generano una linea di forza magnetica si verifica che:
·
Le linee di forza sono uscenti dal polo Nord, quindi generano
all’indotto una f.m.m. negativa.
·
Le linee di forza sono entranti nel polo SUD, quindi generano
all’indotto una f.m.m. positiva.
Solenoidale:
Riferito a quel particolare “campo” (vedi glossario) in cui non è
possibile identificare un punto di origine e di fine della linea di forza
(vedi glossario). Una linea di forza solenoidale è quindi chiusa su stessa,
percui una particella resa libera di muoversi lungo di essa alla fine, per
quanto ampio sia il giro, ritornerà al punto di partenza. Sono solenoidali ad
esempio i campi magnetici e di induzione a meno che non si verifichino delle
condizioni non teoriche ma reali in cui siamo in presenza di “Flussi dispersi”
(vedi glossario). Mi viene da aggiungere: il campo solenoidale ha divergenza
nulla, ma evito e rimando gli interessati alle dispense di metodi matematici
per l’ingegneria (disponibili sul mio sito) in cui si parla di Rotore,
Gradiente, Divergenza.
Solenoide:
Generatore di campo solenoidale (vedi sopra). Per generare un campo
solenoidale è sufficiente un insieme di spire cilindriche (dette appunto
solenoide) nel cui asse interno il campo sviluppato è rettilineo per poi
incurvarsi non appena uscito dalla struttura cilindrica di cui la prima e
l’ultima spira fungeranno da poli (vedi glossario). La traiettoria si
incurva sempre di più fino a che la linea di forza rientra nel
solenoide chiudendo la sua forma chiusa chiamata appunto solenoidale
(vedi glossario). In teoria funziona come appena detto, ma nei casi concreti e
relativamente a campi magnetici o di induzione (vedi glossario) la
grandezza lungo la linea subisce una attenuazione dovuta al fattore µ
(permeabilità magnetica concettualmente simile a una resistenza per i campi di
corrente) quindi si attenua sempre più e non riuscendo così a rientrare nel
polo complementare da cui è uscito. Parleremo in questo caso di flusso
disperso concetto di fondamentale importanza nello studio delle macchine
elettriche.
Flusso:
Concettualmente più semplice di quanto possa sembrare. Si tratta del prodotto
di una superficie (di solito la sezione di un conduttore elettrico o
magnetico) per l’intensità del campo che in quel punto l’attraversa. L’unica
avvertenza di cui tenere conto e che con il termine sezione si intende quella
superficie che risulta perpendicolare al vettore del campo.
Flusso concatenato:
E’ quel flusso, come sopra definito, le cui linee di forza cadono sulla
superficie contornata ad esempio da una spira di rame. E’ fondamentale sapere
che flussi concatenati costanti non hanno alcun effetto sulla spira, mentre
flussi concatenati variabili hanno l’effetto di indurre(vedi glossario) una
tensione ai capi di una spira. Questa tensione la chiameremo f.e.m. (forza
elettro motrice) e sarà indicata con il simbolo ε e definita in valore
dalla legge di Lenz (fondamentale per il funzionamento delle macchine
elettriche).
Forza magneto
motrice: indicata con f.m.m. è il prodotto del numero delle spire per la
corrente che le attraversano. Per questa ragione è spesso chiamata
Ampère/spire. Solitamente la forza magneto motrice è messa in gioco dalle
macchine elettriche al “traferro”(vedi glossario). E’ equiparabile a
una caduta di tensione magnetica.
Traferro:
Interstizio esistente tra la parte fissa e la parte rotante della macchina.
Dal punto di vista fisico (la materia fisica, che ho insegnato parecchi anni
nella formazione professionale, e non un pezzo concreto da prendere in mano e
toccare) risulta essere equiparabile ad una “resistenza” dato che esistono
delle analogie dirette tra grandezze elettriche e grandezze magnetiche (vedi
legge di ohm magnetica). Il traferro è spesso sede di dissipazione di energia
magnetica.
Riluttanza: si
sviluppa in maniera più evidente nei traferri ed è sostanzialmente una
resistenza, per le analogie elettromagnetiche, al passaggio del flusso o delle
linee di forza del campo magnetico o di induzione ad esso proporzionale. Il
prodotto della riluttanza per il flusso magnetico restituisce anche esso una
caduta di tensione magnetica (o forza magneto motrice) dando origine alla
seconda forma delle legge di ohm magnetica.
Induttore: Quella
parte della macchina rotante in cui si sviluppa il campo e lo si proietta
tramite i poli verso la sezione antagonista della macchina. Nelle macchine
elettriche in continua, siano esse motori o dinamo, l’induttore è la parte
fissa.
Indotto: Quella
parte della macchina rotante in cui si subiscono le linee di forza generate
dall’induttore (vedi sopra). Nelle macchine in continua, siano esse dinamo o
motori, l’indotto è la parte mobile.
Statore: Sempre e
comunque la parte fissa della macchina rotante.La questione si complica dato
che le macchine possono presentare induttore statorico o rotorico a seconda
della tipologia costruttiva. E’ già definito a glossario quale è la
funzionalità statorica dei una macchina D.C. guardando la voce “indotto”.
Riassumendo brevemente, in quanto esula dall’argomento di questo tutorial
vediamo un elenco puntato:
·
Macchine A.C. sincrone (statore=indotto, rotore induttore)
·
Macchine A.C. Asincrone (statore=induttore, rotore indotto)
·
Macchine D.C. (statore=induttore, rotore=indotto)
Rotore: parte
mobile della macchina rotante, per la funzionalità operativa del rotore a
seconda del tipo di macchina vedi glossario voce statore.
Isotropia: Con il
termine isotropo, per le macchine elettriche rotanti in continua si intende
una eguare distribuzione di forze e campi tra apparato rotorico e statorico.
Questa è una definizione più vincolante rispetto a quella in uso per le
macchine A.C. sincrone/asincrone in cui si intende che la parte rotorica e
rotorica siano entrambi a poli non sporgenti, ovvero a rotore e statore di
tipo liscio e quindi con avvolgimenti di tipo distribuito (e non concentrato
perché implica un polo saliente attorno cui avvolgere la bobina), all’interno
di cave ricavate nel rotore e nello statore.
Eccitazione (o di
eccitazione): Riferito di solito a una corrente detta appunto di
eccitazione. E’ quella corrente delegata alla creazione del campo di induzione
B che farà denominare quella sezione della macchia L’INDUTTORE.
Laminazione: Si
contrappone a “massicio”. Si intende che il nucleo magnetico è formato da
lamierini isolati e sovrapposti. Il piano di laminazione sarà parallelo al
piano di azione del campo B in modo da produrre per la legge della mano
destra, una corrente che cercando di scorrere perpendicolarmente incontra le
interruzioni dovute agli isolamenti interlaminari al fine di impedire le
correnti libere di facoult che porterebbero il nucleo alla fusione per quanto
massiccio (si pensi come esempio ai forni ad induzione).I pacchi lamellari
sono necessari quando l’induzione non è costante me bensì sinusoidale. Se
l’induzione è costante non si sviluppano correnti libere (al massimo un
accumulo di potenziale) e quindi il nucleo può essere costruito con materiale
massicio.
Avvolgimenti (versi):
Il verso di avvolgimento di una bobina ha fondamentale importanza nella
costruzione e la funzionalità delle macchine elettriche. Useremo la
convenzione derivata dai testi di fisica di indicare con una crocetta un verso
“entrante” e con un pallino un verso “uscente”. Personalmente impiego il
seguente promemoria. Immaginiamo una freccia scagliata con l’arco su un
bersaglio. Se guardiamo il bersaglio da davanti vedremo la coda della freccia
ovvero il suo impiumaggio che rappresentiamo come una freccia. Se andiamo
dietro al bersaglio vedremo la sua punta, ovvero la freccia che esce,
rappresentata come un pallino (punta). Resta cosi definita l’importante
convenzione corrente o campo uscente PALLINO, mentre corrente o campo entrante
CROCETTA. J è più facile così …non credete?
Tamburo (avvolgimento
a): nelle macchine elettriche in continua spesso (o sempre) si usa
avvolgere l’indotto (vedi glossario) in modalità “a tamburo”. Questa tecnica
può essere raffigurata come segue, o almeno io la spiego così ai miei studenti
più giovani (15 anni) e vedo che la capiscono. Procuriamoci l’anima in cartone
di un rotolo di carta igienica. (questa la abbiamo tutti). Sull’altezza del
cilindro tracciamo con una matita tante righette parallele, possibilmente
equidistanti. Prendiamo un vecchio relè con i contatti rotti, o qualche cosa
di elettromeccanico inutilizzabile, (non rompete qualcosa di nuovo o
funzionante perché non ne vale la pena). Scegliamo una delle righette
parallele che decideremo essere la prima del nostro avvolgimento, quindi
facciamo un piccolo foro e passiamoci da dentro verso in fuori il filo di rame
smaltato. Usando piccole quantità di colla gommosa fissiamo i cavi al cilindro
sovrapponendoli alle righette tracciate a matita. Ovviamente, una volta
raggiunta l’estremità attraverseranno la base del cilindro (in aria) per
rientrare nella righetta diametralmente opposta. Una volta raggiunta l’ultima
righetta facciamo un forellino e entriamo ne cilindro. Lasciamo una decina di
centimetri di conduttore a penzoloni, ed ecco ottenuto il nostro “avvolgimento
a tamburo”. una piccola applicazione pratica vale più di 100 disegni su un
testo.
Toro (o toroidale):
con toro si intende la classica forma a ciambella o ad anello spesso ed è
riferito ai nuclei ottimali per trasformatori o per indotti di particolari
macchine in continua. Il toro è anche usato negli esperimenti sulla fusione
nucleare a caldo di tipo a inversione di campo (RFX cnr di Padova). La
caratterista di questi nuclei è che essendo privi di traferro non presentano
per i campi e flussi indotti al loro interno una caduta di potenziale
magnetico. Con toroidale ci si riferisce invece a quel particolare tipo di
avvolgimento che viene avvolto attorno ad un nucleo toroidale. Il termine
deriva dal greco e realmente richiama la forma dell’anello che veniva posto
sul naso del toro (bovino).
Collettore: Prima
di spiegare cosa è il collettore leggete qui sopra la spiegazione
dell’avvolgimento rotorico a tamburo. Alla fine vi troverete con due fili di
rame a penzoloni, dove li colleghiamo? Spero sia chiaro a tutti che quanto
costruito è l’apparato rotorico (vedi rotore nel glossario), quindi ci vuole
un meccanismo che permetta a questi due cavi di essere alimentati da un
circuito esterno e di poter ruotare senza intrecciarsi. Il collettore ha
infetti due scopi egualmente importanti di cui uno è questo. Ogni collettore è
formato da delle lamelle di rame a cui sono collegati i capi di ogni
conduttore (o raggruppamenti dei conduttori) dell’avvolgimento a tamburo.
Sulle lamelle strisciano le spazzole, per il momento diciamo solo che devono
presentare un’elevata resistenza di contatto, ma la trattazione sui materiali
con cui costruirle è davvero ampia e complessa. Esula quindi da questo
tutorial… che già di per se stesso mi sta sfuggendo di mano come lunghezza
espositiva, ma mi sto rendendo conto che senza una così prolissa premessa
sarebbe praticamente illeggibile a tutti. Tornando alle spazzole, è bene che
queste siano poste in modo da essere ( se solo due) in posizioni opposte
rispetto al cerchio che è la base del nostro avvolgimento a tamburo
artigianale. La linea diametrale che unisce le due spazzole è nota in
bibliografia come piano di commutazione. Volendo avanzare un pò la
costruzione del nostro motore/dinamo home made, procuriamoci un’astina di
legno bella dritta e che possa fuoriuscire dal nostro tamburo per almeno 5 cm
per ogni parte. (in mancanza di una astina cosi bella facciamo pure usando uno
spiedino da cucina del tipo lungo). Sagomiamo dei pezzettini di filo di ferro
in modo facciano sia da supporto che da cuscinetto. Alla fine spingendolo con
un dito dovrebbe ruotare abbastanza libero. Ora vanno aggiunte le lamelle a
cui collegare i capi dell’avvolgimento. Procuriamoci del foglio metallico il
più sottile possibile (non ho provato ma dovrebbe funzionare anche il
materiale di cui sono fatte le lattine, un alluminio tremendo da saldare a
stagno a grattandolo un po con la carta vetrata fine alla fine ci si riesce.
Ovviamente le lamelle devono essere leggermente minori di 180 gradi una volta
curvate e incollate a un piccolo cilindretto del diametro di un paio di cm,
questo perché non devono essere in corto tra loro. Questo secondo piccolo
cilindro lo ho ottenuto in una prova sperimentale di qualche anno fa,
avvolgendo in maniera stretta e compatta, imbevendo in colla vinilica
(vinavil) lunghe striscioline di carta. Vi ricordate le stelle filanti? Quei
bellissimi coriandoli che venivano lanciato soffiandoci dentro quando eravamo
giovani? L’idea l’ho presa da la. Il rotore è pronto. Ora prendiamo due molle
recuperate da delle penne a scatto morte. (heheh, non si butta via nulla).
Creiamo, sempre con la carta dei piccoli cilindretti (bloccati con nastro
adesivo) dentro cui le molle trovano alloggio ma che fuoriescano per qualche
millimetro. Vincoliamole alla struttura nella maniera che ritenete più
opportuna in base alla vostra personale costruzione, ovviamente il cilindretto
porta molla dall’altro lato è chiuso per impedire che la molla scappi via, e
altrettanto ovviamente avrete collegato l’estremo non a contatto delle lamelle
della molla con un filo elettrico. Ecco simulato il collettore e le sue
spazzole. Ora manca lo statore. Lo statore nelle macchine in continua è
l’induttore (vedi glossario), quindi la cosa migliore e simularlo con due
magneti permanenti meglio se uguali. Procurasi delle calamite non è difficile,
ad esempio nei negozi di bricolage o fai da te vendono quelle per tenere
chiuse le ante degli armadietti a un paio di euro. Compriamone due. In
alternativa usate quelle degli altoparlanti. Bene… tenete vicino a voi un
estintore J …alimentate con un alimentatore limitato in corrente… e se
siete fortunati ed avete lavorato bene… magia !!! tutto l’ambaradan si
mette in rotazione. Ricordatevi che è solo un giochino didattico, fatto per
analizzare il fenomeno a scuola. Non costruite mai un motore così perché siamo
ben distanti dalla reale complessità costruttiva di una macchina elettrica con
un rendimento accettabile.
Collettore (scopo
fondamentale): Per quanto riguarda lo scopo principale leggiamo la voce
precedente del glossario.Altrettanto importante è la funzione di raddrizzare
la tensione alternata prodotta dall’indotto quando la macchina
elettrica è configurata per funzionare come generatore (dinamo). La
conversione alternata continua avviene disponendo con opportune sequenze le
lamelle e le spazzole. Tra i principali difetti di un sistema a
spazzole/collettore c’è la produzione di scintillio che rende vietato l’uso di
questo tipo di motori/generatori in ambienti dove può esserci del gas
esplosivo o polveri/liquidi infiammabili, Ovviamente dove c’è plasma c’è
effetto tunseng (non è la sede per spiegare cosa è ma non è difficile
documentarsi) che porta al danneggiamento e al “consumo” delle parti del
collettore (spazzole e lamelle).
Passo polare: è
semplicemente una distanza solitamente indicata con la lettera greca 2τ “due
tau”. Considerata la sezione trasversale (vedi glossario) della macchina
elettrica in generale, e rettificata (vedi glossario) contiene in lunghezza un
polo “N” e un polo “S”. Per semipasso polare si intende quindi la
misura che in una macchina in continua contiene una sola espansione polare di
statore.
Piano (o piani di..):
nelle macchine in continua si identificano principalmente tre piani, questi
sono:
·
Piano polare prolungando le linee di forza che fuoriescono dal
centro un polo N al fino al punto di rientro nel polo S, andando dritti anche
le linee curvano, si identifica il piano polare.
·
Piano interpolare a volte detto piano neutro. Identificata la
distanza tra due poli (immaginiamo di avere disegnato lo statore come aperto e
disteso su un piano, ovvero rettificato, cioè reso dritto o piano (cosa che si
fa solo sulla carta e dal punto di vista teorico), chiamiamo questa distanza
“semipasso polare”, solitamente indicata con la lettera greca
τ“Tau”, è il piano che passa tra i
due poli successivi. Ne deriva che per una macchina con statore a soli due
poli, il piano interpolare che passa a distanza
τ“Tau”, dal punto di origine del
disegno risulta essere anche perpendicolare al piano polare.
·
Piano di commutazione è il piano identificato dalla coppia di
spazzole secondo quanto spiegato più sopra, alla voce collettore di questo
glossario. Benchè il piano di commutazione sia fisso durante il funzionamento
questo può essere spostato di un certo angolo rispetto al piano interpolare.
Quando la macchina è usata come dinamo, spostando il piano di commutazione con
un angolo in ritardo si abbasserà la tensione alle spazzole a parità di
velocità di rotazione.
Commutazione: E’
il fenomeno del collettore (vedi glossario) per cui le spazzole entrano in
contatto elettrico con lamelle di rotore successive, durante la rotazione.
Consideriamo le spazzole sul piano interpolare (a volte chiamato neutro).
Quando le spire passano sopra a tale piano non sono sede di f.e.m. e quindi
con l’indotto a vuoto l’induzione è nulla mentre a carico intervengono
fenomeni sovrapposti che potranno essere studiati separatamente.
Tempo di
commutazione: è l’intervallo di tempo nel quale le spazzole
cortocircuitano le spire di commutazione, ovvero il tempo in cui la spazzola è
elettricamente collegata con due lamelle contemporaneamente.
Spazzole: i
fenomeni transitori dovuti alla presenza di circuiti induttivi danno luogo al
scintillio alle spazzole. Queste sono dunque un punto critico per la macchina
elettrica. Per ridurre il fenomeno è opportuno aumentare la resistenza di
queste operando sul materiale di cui si compongono. Dato che il fenomeno dello
scintillio è innescato dalla costante di tempo T= L/R, è evidente che
aumentando R al denominatore diminuisce la costante di tempo con l’effetto
dell’estinzione più celere delle scintille. Ovviamente bisognerà trovare un
compromesso dato che l’aumento della resistenza di contatto diminuisce il
rendimento del motore/dinamo. Si adottano i seguenti materiali:
·
Grafite naturale: d.d.p per coppia di spazzole da 1,5 a 2 volt
·
Elettro grafite: d.d.p. per coppia di spazzole da 0,5 a 1 volt
·
Metal grafite: d.d.p. per coppia di spazzole come sopra da 0,5 a
1 volt
Cave: Si tratta
di scanalature aperte lungo la lunghezza del rotore in cui sono alloggiati i
conduttori. Lo spessore dei cavi quindi non influenza il “traferro” (vedi
glossario) che mantiene una estensione costante, quindi “riluttanza” (vedi
glossario) costante. Se la forma delle cave è, in sezione, rettangolare allora
si dicono “aperte”, se mostrano una sorta di punte che fungono da espansioni
polari allora si dicono semiaperte o addirittura chiuse. Lo studio dei campi
in gioco è diverso. Ogni cava può contenere uno o più conduttori.
Sezione trasversale:
E’ il tipo di sezione che si ottiene tagliando la macchina elettrica come se
fosse un salame.
Saturazione:
consideriamo una massa metallica inizialmente in quiete. Immergiamola in un
campo di induzione B variabile secondo una leggere lineare (una rampa
in aumento). Si verifica che le molecole metalliche o gli atomi in caso di
materiale puro tendo ad orientarsi all’interno della massa seguendo con la
loro polarità quella imposta dalle linee di forza in transito. L’angolo
assunto dalle molecole/atomi non è istantaneo o scatto ma bensì progressivo ed
ha l’effetto di rendere magnetico anche questo materiale inizialmente neutro a
causa del caos interno dell’ordine molecolare. Man mano che l’orientamento
avviene tutte o quasi le molecole, ad un certo valore di campo di sono
orientate e quindi non vediamo più un aumento del campo totale interno alla
massa. La funzione di aumento che prima era lineare tende a incurvarsi e ad
assumere un andamento parallelo all’asse delle ascisse nel grafico B-H.
Questo fenomeno si chiama saturazione. Aggiungiamo anche che per fare tornare
allo stato iniziale la massa bisognerà applicare un campo maggiore di quello
che ha portato il blocco alla saturazione dato che ora dovra vincere oltre al
campo esterno anche quello proprio generato dalla massa stessa. Questo campo
di “annullamento” è noto come campo coercitivo. Questi sono i fenomeni
che danno origine al noto ciclo di isteresi quando i campi hanno forma
alternata.
Detto questo facciamo
un esperimento: prendete in mano un qualsiasi testo, a qualsiasi livello,
di “macchine elettriche”. Aprite una pagina a caso del capitolo “macchine
elettriche in continua” e leggete alcune frasi. Se riuscite a agganciare
mentalmente il discorso allora il glossario ha svolto la sua funzione. Questo
anche se non avete mai letto quel testo di macchine elettriche.
Esercizio: se non disponete di un testo di macchine elettriche
provate a leggere e a comprendere le frasi che seguono, se vi saranno chiare
significa che siete pronti per affrontare lo studio a qualsiasi livello
della materia. Se qualcosa vi sfugge tornate indietro e rileggete il
glossario.
Inizio esercizio: La macchina elettrica a corrente continua si
ottiene disponendo su uno statore a poli sporgenti un avvolgimento di
eccitazione concentrato, avvolto intorno ai poli e alimentato in corrente
continua, e su un rotore isotropo un avvolgimento di indotto distribuito a
collettore, generalmente a tamburo , i cui conduttori sono collocati in cave
di tipo aperto ricavate sulla periferia esterna del rotore. Tali conduttori
sono collegati alle lamelle del collettore, solidale con il rotore, su cui
strisciano in posizione fissa una o più coppie di spazzole o di file di
spazzole che collegano l’avvolgimento di indotto con un circuito esterno.
Tutto chiaro? Se si, provate a rispondere a queste domande:
1. Quanti fili
fuoriescono da questa macchina, se non chiaramente specificato?
2. Chi è a ruotare?
L’indotto o l’induttore? E come si chiama?
3. I poli di indotto
sono salienti concentrati o lisci e distribuiti? Ha senso la domanda?
Fine esercizio.
Le macchine
elettriche in continua, Trattazione.
Una macchina elettrica
in continua si ottiene disponendo su uno statore a poli salienti gli
avvolgimenti di eccitazione concentrati e avvolti attorno all’asta dei poli.
L’avvolgimento di
indotto è distribuito (in senso di non concentrato attorno a poli salienti,
infatti l’indotto è il rotore ed è liscio), di tipo a tamburo i cui conduttori
sono inseriti in cave di tipo aperto ricavate sulla superficie del rotore.
I conduttori sono
collegati alle lamelle del collettore che risulta coassiale e solidale (fisso,
nel senso che non perde giri rispetto ad esso) con il rotore, su cui
strisciano in posizione fissa le spazzole. Queste sono organizzate a coppie e
generalmente sono da un minimo di una a un massimo di alcune coppie. Hanno lo
scopo di collegare il circuito rotante interno con uno fisso esterno.
L’alimentazione
dell’avvolgimento di eccitazione può avvenire utilizzando una sorgente esterna
di corrente continua detta ausiliaria (eccitazione separata) oppure sfruttando
il magnetismo residuo che il circuito magnetico conserva una volta
precedentemente utilizzato (macchina autoeccitata).
Lo statore oltre ai poli
principali può presentare anche i poli ausiliari e gli avvolgimenti
compensatori.
Ora è prematuro
descrivere la funzionalità di questi poli, ma ci arriveremo presto.
Lo statore è realizzato
con materiale massiccio in quanto è interessato da un flusso costante nel
tempo.
Il rotore invece è
costituito da un materiale magnetico laminato in quanto sottoposto a un flusso
variabile.
La macchina in corrente
continua può funzionare da generatore “dinamo” o da motore. Molto più spesso è
utilizzata come motore.
Vediamo la struttura
base della macchina vista in sezione trasversale (vedi glossario).
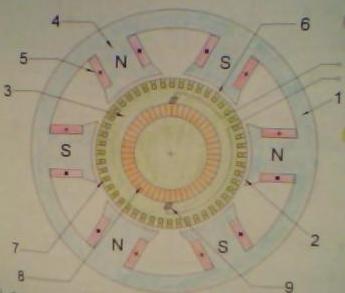
Che la foto fa schifo
perché è un pò sbiadita lo vedo e mi dispiace, ma qui non ho possibilità di
disegnare decentemente, sto usando il notebook con uno schermo piccolissimo
e a parte il paint non ho strumenti di disegno. Fotografo quindi questo
vecchio disegno usando la webcam integrata e che il cielo me la mandi buona.
Analizziamo le parti componenti:
- ·
1 – in azzurro- Apparato statorico (induttore nelle macchine in
continua), è in pratica anche la cassa metallica del motore/dinamo, Notiamo
le espansioni polari indicate con N-S, la parte larga superiore si chiama
scarpa polare, mentre le aste polari sono il supporto per gli avvolgimenti
di tipo concentrato. Gli archetti tra i poli chiamano gioghi magnetici.
- ·
2 – traferro- ovvero luogo in cui si induce la forza magneto motrice
e viene poi trasformata in coppia o viceversa a seconda che si tratti un
motore o di una dinamo. Il traferro un interstizio d’aria che permette la
rotazione della parte mobile (vedi glossario).
- ·
3 – in verde- Apparato rotorico
- ·
4 –in azzurro- particolare di un polo saliente.
- ·
5 –in rosso- avvolgimento di eccitazione concentrato
- ·
6 –cave di tipo aperto- in esse sono alloggiati due conduttori
rettilinei dell’avvolgimento a tamburo
- ·
7 –conduttori- dell’avvolgimento distribuito a tamburo collegati in
testa alle lamelle del collettore
- ·
8 –lamelle- del collettore (arancioni) in numero ovviamente uguale
alle cave
- ·
9 –spazzole- che identificano il piano di commutazione
Subito sopra al numero
1 vediamo fuoriuscire i terminali di collegamento connessi alle spazzole del
collettore.
Funzionamento da
generatore.
La corrente continua che
percorre il circuito di eccitazione mette in gioco al traferro una forza
magneto motrice di tipo rettangolare (quindi alternata anche se non
sinusoidale) fissa rispetto allo statore il cui andamento viene visualizzato
nel disegno sottostante che rappresenta un tratto della sezione trasversale
rettificata (resa piana) e relativa a un solo passo polare.
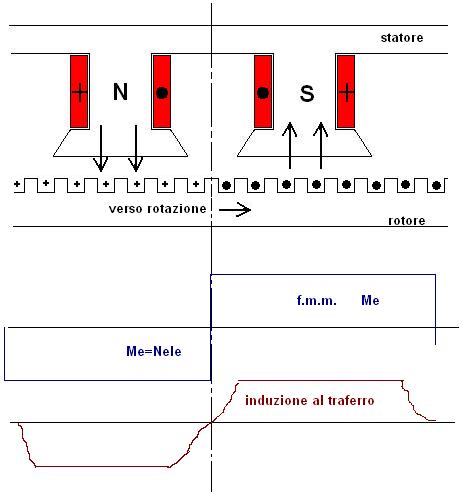
Come vediamo nel disegno, la parte bassa, rotore, si sposta verso destra, il
che corrisponde ad una rotazione in senso orario. I vettori uscenti dai poli
sono quelli dell’induzione B, quindi risultano perpendicolari al moto. Le
linee tracciate dai conduttori dell’avvolgimento di indotto (rotorico)
risultano perpendicolari ad entrambi. Anche se le grandezze fisiche in gioco
non sono proprio le stesse assomiglia fortemente alla legge della mano
destra di cui c’è una chiara spiegazione più avanti. Nell’algebra dei
vettori esistono due tipi di prodotto:
· Prodotto
vettoriale: indicato con X che si esegue facendo il prodotto dei moduli
dei vettori interessati e la moltiplicazione del risultato per il seno
(tasto sin della calcolatrice) dell’angolo che questi formano tra loro. È
facile provare che il senno di un angolo di 90 gradi vale 1, quindi il
prodotto vettoriale del vettore induzione (verticale, uscente dal polo
rispetto alla superficie del rotore) con il vettore velocità che è
perpendicolare ad esso, per il seno di 90 gradi che è appunto 1, vale
semplicemente “bv”. Il prodotto vettoriale è però caratterizzato dal fatto
che il risultato è a sua volta un vettore la cui direzione si trova
chiudendo l’angolo compreso facendo mentalmente ruotare il primo vettore
verso il secondo e applicando quindi la regola del “cavatappi”. Ne risulta
in questo caso un vettore parallelo alle cave di rotore. Detto questo, è
abbastanza banale dimostrare che il prodotto vettoriale non è invertibile
difatti il vettore risultante pur avendo lo stesso modulo sarebbe puntato
dalla parte opposta.
· Prodotto
scalare: indicato con il pallino °, si calcola sempre considerando i
moduli dei due vettori interessati ma moltiplicando poi il risultato per il
coseno (tasto cos della calcolatrice) dell’angolo compreso tra i due
vettori. Non ha senso parlare di direzione del risultato perché questo non è
un vettore ma appunto uno scalare, ovvero un numero con la sua eventuale
unità di misura. Detto questo, e considerando i risultati del punto
precedente in cui affermavo che “bv” sono paralleli al vettore L che
è adagiato in parallelo sulle cave rotoriche, dato che ha significato di
lunghezza del tratto di conduttore in cava sull’indotto, si verifica la
seguente relazione:
ε=( v X b)°L =vbL
Tale relazione è la forza elettro motrice indotta (f.e.m.) su un singolo
conduttore di rotore della macchina elettrica convenzionata come dinamo.
Ovvero una tensione. Tale tensione sommata aglie effetti degli altri
conduttori perviene alle lamelle dove poi sarà prelevata dal collettore
tramite le spazzole.
Così abbiamo chiarito, tramite un’analisi interna dei “campi” (vedi
glossario) il funzionamento di questa utile e molto diffusa macchina
elettrica in D.C.
Per completezza posso accennare al fatto che la velocità radiale periferica
del rotore (in qualche maniera imposta esternamente all’asse del rotore
tramite un motore primo quale la ruota della bicicletta, una turbina, un
motore a scoppio, una pala a vento, ecc) è pari a:
v=Ω(D/2)
dove ho indicato con D il diametro esterno dell’avvolgimento a tamburo sul
rotore, mentre Ω è la pulsazione angolare che sta in relazione con i giri
eseguiti al minuto dall’asse secondo la formula:
Ω = 2πn/60
Con n che indica il numero di giri al minuto del rotore.
Ritengo inopportuno approfondire ulteriormente l’argomento dinamo perché la
materia è davvero molto vasta, complessa e “difficile da memorizzare”,
percui chi fosse interessato può andare a prelevare i miei appunti
manoscritti nel sito “gtronic”. Tanto per dare una traccia dovreste
guardare, il funzionamento a carico della dinamo, la commutazione, la
reazione di indotto.
Funzionamento da motore.
Come già detto non vi è differenza strutturale tra la macchina usata come
generatore (dinamo) e come motore. Ricordo solo, a titolo puramente
accademico che la dinamo è il convertitore di energia da meccanica ad
elettrica mentre il motore, viceversa, converte l’energia elettrica in
meccanica.
I sistemi di eccitazione rimangono gli stessi dell’uso come dinamo, magari
con qualche ottimizazione:
· Eccitazione
serie
· Eccitazione
derivata
· Eccitazione a
magnete permanente.
Per quanto riguarda i primi due metodi, possono essere implementati in
“autoeccitazione” quando le bobine in serie o in parallelo all’indotto usate
per l’eccitazione sono appunto attraversate dalla medesima corrente (serie)
o dalla corrente derivata (parallelo) della medesima alimentazione. Oppure
indipendente quando pure mantenendo la stessa forma e posizione, le bobine
di eccitazione sono alimentate da una fonte esterna.
Ovviamente nella versione a magnete permanente ci penserà una calamita
statorica a creare il campo B di induzione.
La macchina D.C. trova più impiego come motore che come generatore data
l’ampia possibilità di regolazione e nel contempo la possibilità di
miniaturizzazione che la porta ad essere impiega in asservimenti di ogni
genere specie di tipo domestico, ludico e auto motive. Ciò non esclude
un’ampia possibilità di utilizzo in ambito industriale anche se spesso si
ricorre ai motori asincroni trifase (M.A.T.) per la grande potenza che
possono facilmente convertire.
Vediamo lo schema di principio del funzionamento di un motore DC con indotto
a spazzole e collettore ed eccitazione a magnete permanente.
Osserviamo la figura: Lo statore è formato da un magnete permanente le cui
linee di induzione come di consueto escono dal polo N (nord).
Supponiamo che inizialmente l’unica spira che rappresenta l’indotto si trovi
su un piano perpendicolare a tali linee di campo. Il contorno della spira,
supposta quadrata di lato a identifichi quindi la superficie Σ=a2
. Ne viene identificato il flusso concatenato Φ=BΣ. Se questo
flusso è costante non c’è f.e.m. alle spazzole e quindi la spira va in corto
circuito, ma come stiamo per vedere subito la spira si mette in moto
variando la superficie che mostra frontalmente all’induttore. Se ne origina
una variazione di flusso concatenato che genera una f.e.m. indotta di tipo
controelettromotrice (vedi legge di Lenz in appendice). Che grazie al suo
segno negativo si oppone quasi in toto alla tensione che alimenta la spira.
Non può opporsi totalmente per due motivi:
1. Le perdite
energetiche non sono nulle e sono immancabili.
2. Se si opponesse
completamente la f.e.m. di alimentazione meno la f.e.m. di reazione darebbe
zero, quindi non ci sarebbe corrente nella spira e il fenomeno si estingue.
Verificato che se il motore si avvia (il rotore non è bloccato) la spira non
va in corto possiamo continuare con la nostra analisi.
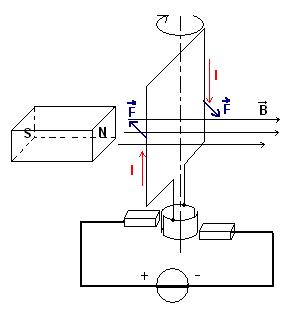
Supponiamo che come indicato nella figura l’alimentazione alle spazzole
abbia il positivo nel lato di sinistra e il negativo su quello di
destra. Ripeschiamo dal dimenticatoio alcuni basilari concetti di fisica.
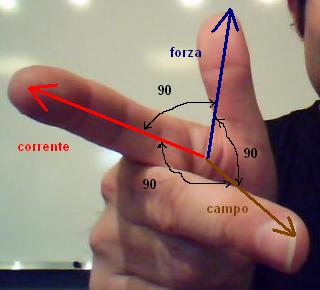
Legge della mano destra:
mettiamo tutti la manona come in figura…. La webcam è scadente non sono
così bruttino…. Hahahhaha
Analizziamo il significato delle tre ditone…che come vediamo vanno tenute
tutte perpendicolari tra loro.
Il lavoro dell’indice è quello di indicare….. quindi indica il verso della
corrente, il medio..e tutti i miei allievi di solito ridono, non serve per i
gestacci ma per indicare il campo B….. come promemoria si pensi che
“indica il lato B” hahahah non lo dimenticherete più.
Il pollicione invece è la risultante, ovvero la forza che poi darà origine
alla coppia.
Ora mi taglio la mano e vi faccio vedere meglio:
Bene, prendiamo in esame il disegno del principio di funzionamento qualche
riga più in su. Analizziamo il lato sinistro della spira, tenendo ben rigido
il sistema F-I-B nelle dita appoggiamo l’indice sulla corrente
del foglio (quella che sale) e contemporaneamente il medio nel verso del
campo. La posizione magari è un po scomoda ma se stampate o fate un disegno
più grande su un foglio di carta vi sarà più agevole. Vi assicuro che è un
investimento che vale la pena. Comunque vi accorgerete che in automatico il
pollice indica il verso della forza nella direzione dove si trova la
calamita.
Ripetete il ragionamento sul lato destro e vi accorgerete che F andrà dalla
porte opposta.
E’ evidente che si è creata una coppia di forze che per definizione da
origine a un momento angolare Ω che è all’origine della coppia.
Ovvero la spira entra in rotazione.
Vi lascio come esercizio la prova di invertire, sulla carta il generatore di
tensione che alimenta l’indotto.
Che cosa avete notato che succede?
….. esatto, J in un motore D.C. spazzole collettore con eccitazione a
magnete permanente invertendo la tensione all’indotto si inverte il verso di
rotazione.
Nota bene: la questione non è scontata in ogni motore D.C., prendiamo
infatti come esempio il campo magnetico sviluppato da un solenoide (vedi
glossario) rettilineo. Il campo di induzione che si sviluppa coassialmente
ha il verso che dipende dalla polarità di alimentazione dell’avvolgimento.
Se ne deduce che se sostituisco il magnete permanente con questa bobina se
cambio polarità cambio senso di marcia? NO ! sbagliatissimo, infatti si
inverte il campo B ma anche la coppia di forze nella spira di conseguenza:
in un motore DC, spazzole collettore con eccitazione derivata anche
invertendo la polarità ai morsetti di alimentazione la marcia del motore va
nella stessa direzione che dipende dal verso fisico di avvolgimento delle
bobine in fase di costruzione.
Ancora diversa è la situazione se si considera un motore che pur avendo
l’induttore “avvolto” riceve la corrente di eccitazione da una fonte
indipendente rispetto ai terminali di collettore (indotto).
Costruiamo la prima interfaccia di controllo:
Da quanto esposto si è dedotto che per invertire la marcia di un mot. DC a
collettore ed eccitazione a magnete permanente è sufficiente invertire la
tensione alle spazzole. Come fare se abbiamo a disposizione una fonte
unipolare (leggasi continua). Data la forte analogia con un argomento già
postato in uno dei miei precedenti articoli, per le prossime righe ripesco
alcune foto e spiegazioni dato che ben si integrano e se le dovessi rifare
verrebbero uguali. Diversa sarà invece la realizzazione pratica della scheda
di inversione che è prodotta nella fabbrica cinese che mi ha già fornito la
MicroGT-PIC e disegnata con Eagle. Sono anche ben cosciente delle
osservazioni postomi in merito alla configurazione circuitale che comunque
continuo a realizzare così dato che è ben testata e funzionante. Ottima
soprattutto per l’apprendimento dei concetti di base come si confà ad un
tutorial. Mi verrà contestato che in caso di “errato comando” i darlighton
si bruciano, e la mia risposta rimane la stessa, cioè evitiamo di dare
comandi erronei (anche perché sono errori molto di base), e testiamo i
software senza collegare l’alimentazione di potenza (come verrebbe spontaneo
a qualunque tecnico delle automazioni). I due led, rosso e verde, presenti
nell’interfaccia hanno anche lo scopo di segnalare la presenza di comandi
incompatibili, ovvero marcia avanti assieme a marcia indietro che comportano
la rottura del ponte. Se qualcuno ne capisce di programmazione di PLC e
microcontrollori avrà già intuito che questo comando non può arrivare
in presenza di un interblocco software all’interno del programma. Con questo
non voglio dire che non esistano configurazioni più complesse e più sicure.
Ricordiamoci comunque che nei casi in cui non sia necessaria la regolazione
della velocità (tecnica PWM) molti eseguono ancora il ponte usando
semplicemente i contatti puliti dei relè. Un ultimo appunto in merito,
quando un microcontrollore ha un problema..del tipo si rompe, le sue uscite
si forzano basse e non alte…sarebbe molto grave se non fosse così.
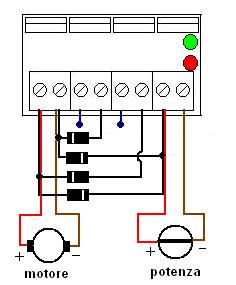
Dunque, in linea di
principio il ponte ad H funziona come indicato nello schema funzionale qui
sotto:
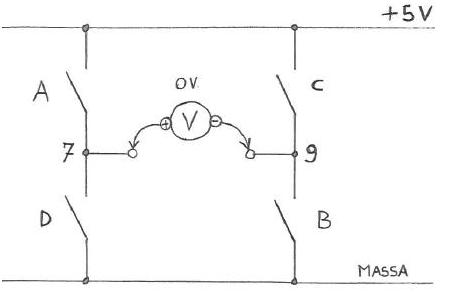
IL ramo di equilibrio non è attraversato da
alcuna corrente ed essendo tutti e quattro i contatti aperti i nodi 7 e 9
risultano al medesimo potenziale flottante la cui differenza misurata dallo
strumento è zero.
Indichiamo con A-B-C-D i quattro contatti fittizi
che nel concreto saranno rappresentati dai 4 transistor mosfet o darlighton
che useremo.
Supponiamo ora che vengano a crearsi tramite un dispositivo di controllo quale
potrebbe essere un microcontrollore o un PLC, le condizioni di comando di
marcia avanti, questo comporta la chiusura dei contatti A-B come in figura.

In questa situazione il punto 7 risulta collegato
al ramo Vcc a tensione +5V interni, mentre il punto 9 risulta collegato
a massa. Lo strumento sarà attraversato da una minima corrente di fuga (il
voltmetro ha resistenza interna elevatissima) che farà comparire una caduta di
tensione positiva con riferimenti punti 7-9. Nel caso vi fosse collegato il
motore questo sarebbe percorso da una corrente di indotto da sinistra verso
destra che lo mette in marcia avanti.
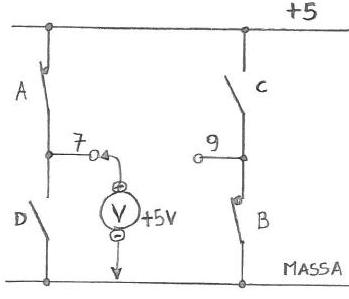
IL voltmetro segna +5 volt (o comunque la tensione a cui alimentiamo il ponte)
solo nel ramo sinistro correttamente riferiti alla massa del circuito, quindi
potremmo sfruttare questo "bit" TTL come segnale di comando di marcia avanti
del ponte H esterno rinforzato, che andremo a creare. L'atro ramo (punto 9)
risulta vincolato a massa quindi fornisce uno zero logico bello stabile.
Eseguiamo lo stesso ragionamento per il ramo destro. Chiudiamo innanzitutto i
contatti della diagonale complementare ovvero C-D come in figura:
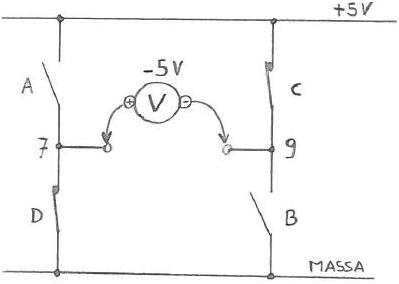
Ovviamente non dobbiamo invertire i puntali del voltmetro perchè questo
corrisponderebbe a invertire i morsetti dell'indotto del motore. Vedremo
comparire una tensione negativa -5V dato che il puntale nero si trova connesso
a +Vcc e il rosso alla massa del circuito. Se ci fosse collegato il
motore l'indotto sarebbe attraversato da destra verso sinistra mettendolo il
rotore in marcia indietro.
In questa condizione di funzionamento un voltmetro inserito nella gamba destra
dell'inverter segnerebbe +5V (o comunque il valore di alimentazione del
ponte).
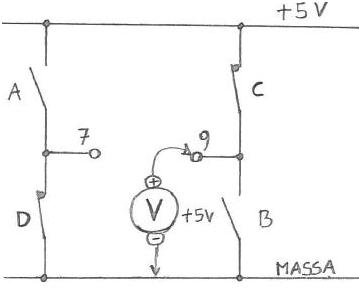
In conclusione di questo breve ragionamento possiamo affermare che vengono
prodotti ai punti 7 e 9 due segnali a 5 volt (o alla tensione di alimentazione
del ponte) che potrebbero tornare utili per tenere sotto controllo i parametri
del motore da parte del sistema di controllo che acquisisce questa
retroazione.
Realizzazione pratica della scheda di interfaccia:
Realizziamo ora la configurazione di base della scheda di interfaccia usando
Eagle e il seguente schema dato che è estremamente semplice e
soddisfacentemente robusto. Gli elemento attivi sono dei transistor
darlinghton NPN modello TIP122. Il data sheet li dichiara in grado di
sopportare agevolmente fino 8 ampere continui e in grado di avere una buona
saturazione con soli 10 mA in base. Questa configurazione è funzionante e
rispecchia direttamente la teoria sopra esposta, tuttavia una ottimizzazione
del circuito richiederebbe una configurazione PNP sugli elementi in alto e
NPN in quelli in basso. Questo comporterebbe però una diversa tipologia di
comando. Con bassi volori di tensione di comando (attorno ai 5 volt) si
verificano difficoltà di saturazione degli elementi in alto (problema che
sparisce con le normali tensione di interfacciamento dei PLC, ovvero 24
volt, ma già a 12 volt il circuito si comporta egregiamente. La maggior
parte dei motori D.C. per asservimento in grado di fornire una certa coppia
(ad esempio quelli per “auto motive”) lavorano a tensioni di 12 volt o
superiori. Chi volesse impiegare questo circuito per alimentare minimotori
a 5V, potra sempre interfacciarli tramite un operazionale, usato come
comparatore che accetti i 5V TTL davanti e li trasformi in 12 o 24 alla sua
uscita. Questo accorgimento è stato integrato nel sistema di sviluppo
MicroGT-PIC versatile IDE che si intende usare nel corso di PIC, fornito
in forma di tutorial qui su grix. A tale proposito ricordo agli interessati
che dispongo di alcuni esemplare a magazzino del PCB di questa
scheda. Chi fosse interessato a seguire il corso di programmazione e ad
avere il proprio esemplare mi può contattare e glielo invierò via posta a
prezzo di costo. Tanto per recuperare almeno le spese sostenute nello
sviluppo.
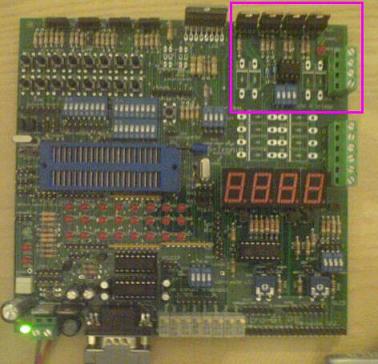
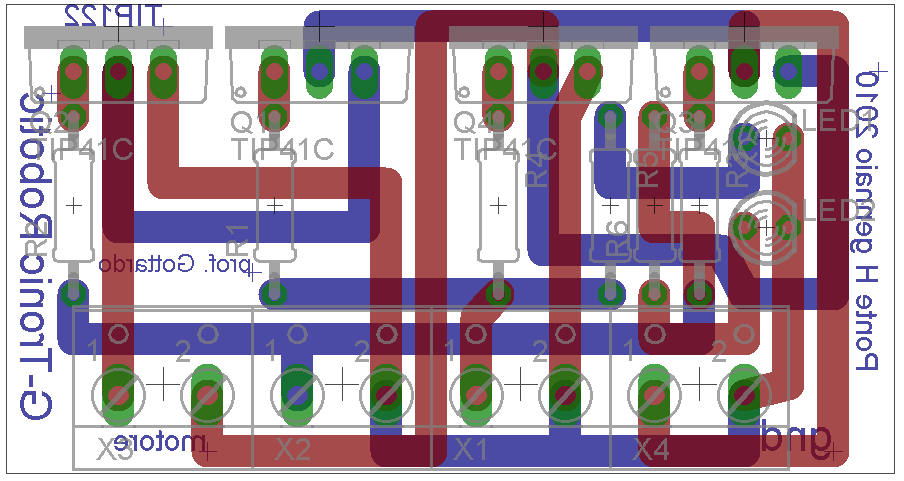
Nel riquadro viola vediamo la sezione del ponte ad H del sistema di sviluppo
MicroGT-PIC versatile IDE. IL progetto completo lo trovate postato qui su
grix. Notiamo la presenza dell’operazionale, avente lo scopo precedentemente
descritto, e dei due zener da 3,3V che forniscono la tensione di riferimento
ai comparatori in modo che il bit logico a 5 volt possa sempre e comunque
fare saturare il ponte in maniera indipendente dalla tensione di
alimentazione di indotto del motore D.C. usato. Notiamo che nella scheda non
sono stati montati i diodi di ricircolo perché per il momento non è previsto
il pilotaggio con la tecnica PWM che vedremo potrà consentire lo
sfruttamento di un’alta coppia all’asse anche con ridotto numero di giri.
(scusate la qualità da webcam, ma io non posseggo una fotocamera digitale).
Vediamo lo schema elettrico di questa sezione:
Tutte le resistenze vanno calcolante considerando circa
10mA con i volt di alimentazione presenti, quindi se usiamo un motore da 12v
dovrebbero essere da 1100, quindi arrotondiamo a 1k (io uso 1k2 e satura
benissimo), se abbiamo un motore a 24 e siamo interfacciati con segnali di
comando provenienti dal PLC allora metteremo 2k2 (valori testatissimi e
assolutamente funzionali).
I darlighton sono indicati come TIP41C, ma voi potrete
installare tranquillamente i TIP122, molto comuni, economici e semplici da
reperire.
Normalmente io installo un led rosso per indicare la marcia
avanti e verde per la marcia indietro, ma questa scelta è assolutamente
soggettiva. L’importante è che mai e poi mai i due led si devono vedere accesi
assieme perché questo errato comando comporta la distruzione dell’interfaccia.
Per questo motivo è bene testare prima il software di controllo scollegando il
solo morsetto positivo dell’alimentatore di potenza (quello del motore). I
segnali avranno solo l’effetto di accendere i led mentre il motore non si
potrà muovere a causa della mancanza di potenza. Se la sequenza di accensione
è OK durante tutta la sequenza di automazione allora potremmo collegare la
potenza e vedremo ruotare il rotore.
Usando Eagle si è ottenuto un circuito molto compatto e nel
contempo robusto e funzionale. Le piste sono state disegnate di largo spessore
vista la notevole corrente che si potrebbero trovare a gestire e il supporto
PCB è ricavato da un laminato di tipo FR4 in grado di sopportare elevati schok
termici ed ovviamente ignifugo.
Questo PCB misura
50mm x 26mm. I file necessari alla realizzazione del PCB usando il CAD
Eagle sono scaricabili dal link sottostante, una volta scompattata la
cartella sul desktop, trascinatela nella sezione progetti del control panel
di Eagle. Aprite il progetto e fate doppio click sul file schematico. Il
board viene poi richiamato automaticamente dall'interno di Eagle con
l'apposito tasto.
Per la realizzazione
automatizzata dei PCB tramite macchine a controllo numerico è necessario
convertire il disegno CAD in un insieme di files comunemente detti gerber.
Essi contengono le informazioni relative ai diametri dei fori e delle loro
coordinate, le serigrafie, la posizione e gli spessori delle piste sia sul
lato saldature che sul lato componenti, la soldermask ecc.
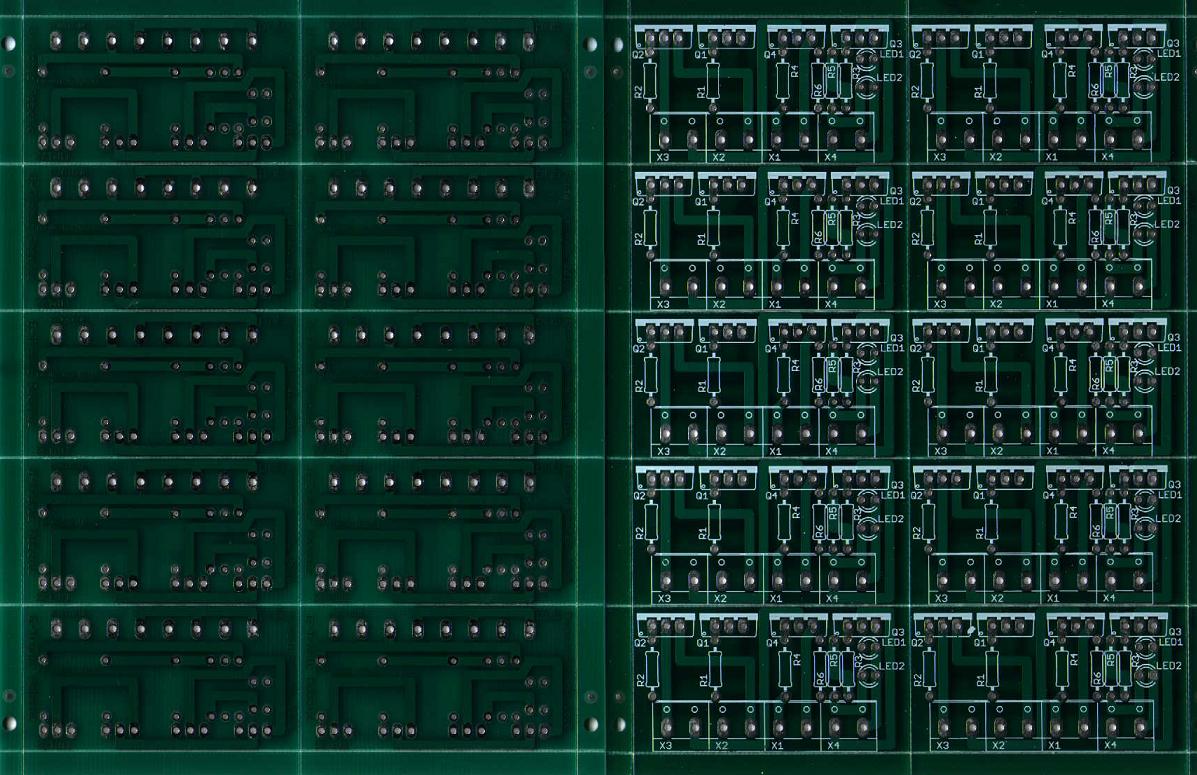
Il primo esemplare del
ponte ad H professionale è stato assemblato durante il corso di "elettronica
di base" che ho tenuto al centro culturale Z.I.P. Gli allievi hanno subito
verificato la differenza di qualità del prodotto professionale rispetto allo
stesso homemade. Le saldature sono molto agevoli dato che i fori sono
metallizzati e ricoperti da una prestagnatura. La costruzione in tecnologia
"Dual Layer" non richiede, come previsto dalla versione precedente in
FidoCad, disponibile nel mio sito personale, nessun ponte dato che le piste
del piano inferiore sono collegate a quelle del piano superiore direttamente
in fabbrica tramite appositi fori metallizzati denominati VIAS. Il PCB
risulta inoltre di diversi millimetri più compatto oltre al fatto che la
tecnologia FR4 lo rende più robusto per le applicazioni di potenza.
Infine il solder (vernice isolante verde) su ambo i lati e la chiara
serigrafia nel lato componenti agevola notevolmente il montaggio.
I morsetti, da sinistra verso destra, sono:
·
Indotto motore morsetto positivo
·
Indotto motore morsetto negativo
·
Comando motore avanti (arriva dal PLC o dal controllo)
·
Massa del precedente comando (libero se le masse sono già in
comune)
·
Comando motore indietro (arriva dal PLC o dal controllo)
·
Massa del precedente comando (libero se le masse sono già in
comune)
·
Alimentazione di potenza positiva.
·
Alimentazione di potenza (massa)
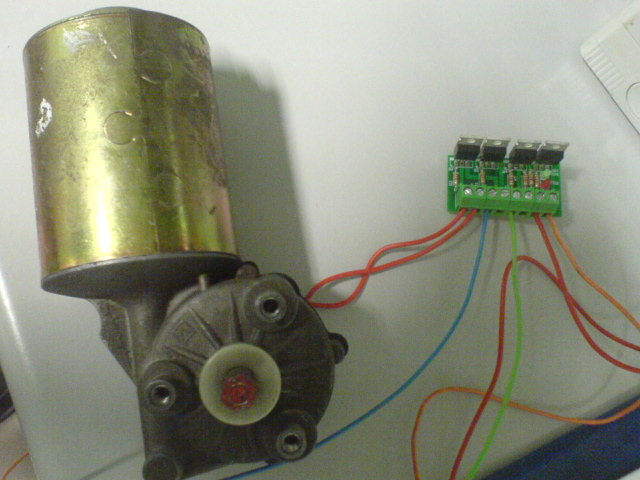
In questa immagine vediamo il ponte ad H
collegato ad un classico motore D.C. spazzole collettore a lamelle con
eccitazione a magnete permanente. Solitamente questo è istallato nelle
automobili e delegato all’asservimento dei finestrini laterali. Questo
modello testato al banco richiede una corrente a vuoto di circa 100 mA,
mentre in fase di generazione della coppia di avviamento (sempre a vuoto)
richiede circa 1A. Come possiamo vedere dall’immagine possiede una
riduzione piuttosto robusta ed eseguirà quando alimentato ai dati nominali
(spesso detti dati di targa, in questo caso 12 volt). La riduzione farà
eseguire a questo motore una rotazione dell’asse al secondo (prova al
banco).
Due di questi motori sono stati montati sul
robot autonomo denominato “optichair” che è in pratica una sedia a rotelle
che assiste grazie a complessi algoritmi e alla presenza di due potenti
computer di bordo pazienti affetti da stadi avanzati della SLA. Dopo
un’interruzione “forzata” delle ricerche per lo sviluppo di questo automa,
e lo smantellamento della versione 2, i lavori stanno per riprendere anche
grazie a un gruppo di persone che crede nell’iniziativa e che è disposta a
metterci del proprio se non meno dal punto di vista tecnico. Spero che
presto potremmo presentare almeno all’università di Padova o altri centri
ricerca pubblici o privati la “optichair 3” sgravata da tutte le
limitazioni e bachi della versione precedente e con le migliorie tecniche
dovute all’avanzamenteo che ha avuto la scienza nel frattempo.
Tornando al nostro sistemino di controllo
del motore D.C. sarà possibile pilotarlo in PWM al fine di regolare anche
la velocità aggiungendo, sfruttando i morsetti esterni di cablaggio, i 4
diodi shotky per il ricircolo delle extra correnti per effetto induttivo.
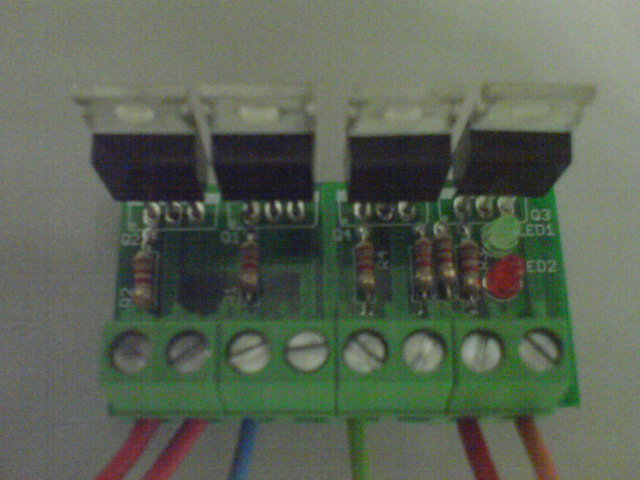
Come collegare i diodi di ricircolo
(specifico per pcb G-Tronic Robotics)
Il significato dei colori è, come già
detto:
·
Blu -> comandi di marcia
·
Rossi -> positivi del motore e dell’alimentazione di potenza
·
Marroni -> Masse, una di queste masse deve collegarsi alla massa
del sistema di controllo (PLC o sistema a microcontrollore).
Se qualcuno fosse interessato ad avere
il PCB di questo circuito
dispongo di alcuni pannellini contenenti ciascuno 10 esemplari. Potrei
fornire questi pannellini per il solo rimborso delle spese sostenute per
costruirli. Contattatemi con messaggio privato, sono disponibili fino ad
esaurimento della piccola scorta.
Personalmente io li uso per piccole
applicazioni civili ed industriali, interfacciamento con PLC,
interfacciamenti elettromeccanici (pulsanti o joystik), esercitazioni
scolastiche dato che il basso costo rende possibile l’esecuzione
all’intera classe (venti esemplari), prove varie di laboratorio, robotica.
Chi fosse invece interessato ad avere una
certa quantità di questi ponti ad H, (non meno di 100 esemplari) contatti
Sandy che vi aiuterà a fare l’ordine facendo da interprete presso la
fabbrica cinese in cui ho già depositato i file gerber.
Sistema di controllo in PWM.
La tecnica PWM è impiegata per il controllo
della velocità dei motori in continua, ad esempio quello esposto in
precedenza, del tipo con indotto a spazzole e collettore a lamelle ed
eccitazione a magnete permanente. L’obbiettivo è quello di ridurre il
numero dei giri senza perdita significativa di coppia utile all’albero.
Facciamo le seguenti considerazioni:
·
La coppia istantanea “C” in Newton per metro è proporzionale alla
tensione massima presente all’indotto.
·
La velocità di rotazione dell’albero “n” in giri al minuto è
proporzionale alla tensione media presente all’indotto.
La tecnica PWM (modulazione dell’ampiezza
dell’impulso) è una maniera per presentare all’indotto una tensione di
picco tipicamente come da dati di targa (a mio avviso anche di una qualche
decina percentuale più alta) e nel contempo variare la tensione media
presente al medesimo collegamento elettrico.
Da quanto detto si ha che si abbassa il
numero di giri rispetto ai dati di targa ma rimane costante la coppia.
Operativamente vediamo come fare:
In appendice ho messo l’importante
definizione di “grandezza continua” che vi invito ad andare a
leggere ora. Secondo quella definizione un motore D.C. non disdegna nessun
tipo di tensione continua per quanto fluttuante questa sia, anche se
ovviamente qualche affetto c’è.
E’ possibile perfino alimentare un motore
D.C. con una tensione sinusoidale-raddrizzata (tempo permettendo farà un
tutorial di elettrotecnica) semplicemente tramite un diodo di potenza
applicato in serie ad una fase del secondario di un trasformatore. Farà
male questa tensione al motore? Risposta: No ! non è nelle condizioni
ottimali ma comunque funziona. La prima cosa che notiamo è una “perdita di
giri” che dipenderà dal fattore di forma (termine non presente a glossario
perché troppo specifico della materia elettrotecnica, prendiamo per buono
cosi secondo il significato intuitivo).
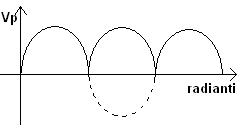
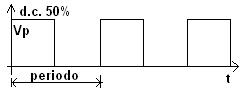
Alimentazione accettabile dal motore D.C.
(pulsante a 100Hz)
Se il motore è in grado di accettare questa
forma d’onda, diciamo “inusuale” per la sua destinazione costruttiva a
maggior ragione potrà accettare un’alimentazione ad onda quadrata (vedi
appendice).
Analizziamo un solo periodo di questa forma
d’onda: Come vediamo agevolmente dal disegno la tensione di picco è pari
alla parte stazionaria alta nel semiperiodo. La tensione media, ottenuta
campionando il segnale alla frequenza minima ammessa dalla regola di
shannon,(vedi appendice) risulta pari a Vp mezzi.
I nostri nonni, nel veneto, avrebbero
enunciato questo teorema dicendo “un alto e un basso fa un gualivo” che in
effetti, nel nostro dialetto rende benissimo l’idea. J
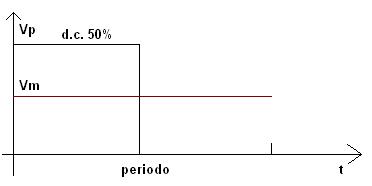
Scherzi a parte, proviamo ad immaginare
l’effetto della degenerazione dell’onda quadra in onda rettangolare,
ovvero di una variazione del duty cycle.
Se spostiamo avanti il
fronte di discesa, tenendo costante la lunghezza del periodo, la tensione
media sale di una quantità proporzionale, vedi figura
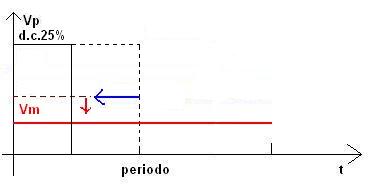
Se la spostiamo all’indietro scende di una
medesima quantità proporzionale, vedi figura.
In definitiva spostando avanti il fronte
di salita il motore aumenta il numero dei giri dell’asse, se lo spostiamo
indietro diminuisce il numero di giri all’asse, ma la coppia rimane
costante perché il valore massimo della tensione all’indotto non è
cambiata. Rimane il problema di come spostare questo fronte di discesa
tramite un circuito elettronico.
Oggigiorno il problema è semplice quasi
banale dato che esistono una quantità infinita di circuiti integrati
dedicati al PWM, ma essendo questo un tutorial di taglio elettronico
vorrei fare ragionare i lettori sulla costruzione manuale di questa forma
d’onda. Vediamo quindi passo passo come ottenerla usando dei comuni
amplificatori operazionali.
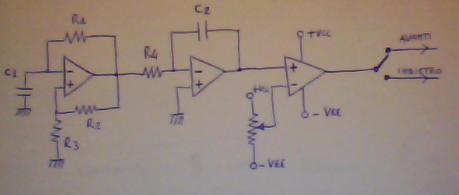
Come già ripetutamente detto, mi trovo a
Belluno per il campus universitario estivo, e non so quanto dovrò starci,
quindi cerco di fare il possibile nonostante la scarsità di mezzi a
disposizione. Disegno lo schemino che vede qui sopra a penna e faccio uno
screenshot con la webcam. La qualità è pessima ma con un pò di impegno
riuscite a leggere i componenti e i collegamenti. Questo tutorial e sulle
macchine elettriche e non sugli operazionali, percui tralascio un pò la
spiegazione approfondita, ma do comunque le indicazioni per poter montare
almeno su breadboard il circuito e vederlo funzionare. Voi direte… ma
questo qui ci vende fumo ! non ha provato il circuito! Vi rispondo…
Tranquilli, montatelo e vedrete che funziona, anche perché è un passaggio
obbligato per i mie ragazzi della formazione professionale, quindi ogni
anno ne assemblo una cinquantina. Funziona quasi tutti sempre al primo
colpo.
Attrezzatevi così:
Se non avete un alimentatore duale
mettetene due in serie da 12 volt. (non si romperanno) Le alimentazioni
duali si fanno proprio così, anche se può sembrare strano. Il punto
centrale della vostra serie di generatori diventa la massa del vostro
schema elettrico, l’alimentatore più in basso ha il meno che diventa –Vee,
e il positivo dell’alimentatore più in alto diventa +Vcc.
Lista componenti.
·
R1 1k
·
C1 100nF
·
R2 2k2
·
R3 10k
·
R4 10k
·
C2 100 nF
·
Potenziometro 47k
·
Deviatore a levetta due posizioni
·
A.O. TL084
Analisi del circuito.
Il primo stadio
è un oscillatore ad onda quadra detto a trigger di schmit. E’ quello un po
più complicato da analizzare perché avendo la doppia retroazione può
mettere in difficoltà i principianti. Ogni dubbio sparisce quando a scuola
faccio questa spiegazione, anche se un po approssimativa. L’anello di
retroazione negativa contiene una costante di tempo data fa T=R1*C1,
quindi a parità di istante di alimentazione ha una risposta più lenta
dell’anello di retroazione positva che è invece puramente resistivo. Si
tratta quindi complessivamente di una configurazione in retroazione
positiva che come tale funziona a scatto comparando i livelli di tensione
tra l’ingresso invertente (indicato con meno) e quello non invertente
(indicato con più) in cui la tensione sta lentamente salendo secondo la
nota curva di carica del condensatore.
La serie R2,R3 costituisce un normale
partitore che sta dividendo i valori di tensione presenti tra +Vcc e la
massa, ovvero 12v, in circa ¾ e ¼ visto i valori scelti di 10k e 2k2.
Quando la carica del condensatore raggiungerà e supererà questo valore (la
cosa avviene in circa 2 volte la costante di tempo R1*C1 date le
proporzioni resistive scelte) il comparatore scatta portando l’uscita
dell’A.O. bassa e iniziando la scarica, con la medesima costante di tempo,
del condensatore C1. La scarica proseguirà fino a che si incontrerà la
soglia, ora bassa e simmetrica rispetto alla precedente e alla linea di
tensione prescelta come massa. A tale valore di tensione raggiunta alla
mezzeria del gruppo R1,C1 il comparatore scatta di nuovo portandosi alla
situazione di partenza. Il ciclo si ripete all’infinito, o meglio fino a
che il circuito non verrà disalimentato. Le due soglie simmetriche
rispetto alla massa danno il nome al circuito di comparatore a finestra o
appunto trigger di schmit.
Il secondo stadio
è un classico integratore, ben funzionante anche come filtro passa basso.
A volte, a seconda delle condizioni di lavoro quali ad esempio la
frequenza del segnale, funzionerà meglio con una resistenza in parallelo
al condensatore C2, che permetterà il bypass alla basse frequenze di
funzionamento. Ma che cosa è un integrale? Nulla di cosi trascendentale,
non è altro che il calcolo dell’area che sta sotto a una curva tra un
istante a e un istante b detti gli estremi di integrazione. Prendete un
pezzo di carta a quadretti e disegnate l’onda quadra. Suddividete l’onda
quadra in rettangolini verticali identificati dai quadretti. Assegnate un
valore, anche fittizio, a questa area e segnatelo con un puntino nello
stesso grafico. Fate la stessa cosa per il secondo rettangolino. Unite i
puntini e vi accorgente che l’integrale del tratto di costante è un tratto
di rampa. Se eseguite questa cosa anche nel tratto negativo dell’onda
rettangolare vi accorgete che ottenete una rampa negativa.
Ne deduciamo che: L’integrale di un’onda
quadra è un’onda triangolare. E questa in effetti è la forma d’onda
trasformata all’uscita del secondo operazionale.
Terzo stadio.
Non è altro che un semplice comparatore, in effetti avrete notato che è
privo di retroazione. Questi compara l’onda triangolare generata
dall’integratore dello stadio precedente con una costante (di tensione)
imposta dalla posizione del cursore sul potenziometro collegato tra +vcc e
–vee, ovvero ad un salto di ben 24 volt. Dato che la tensione è un pò
altina non scendiamo con il valore ohmico sotto i 47k (5 milliampere),
anzi se ne avete uno di più altino, ad esempio 100k sarebbe meglio (circa
2,4 milliampere). Se avete a disposizione un oscilloscopio e tre sonde
(significa che siete ricchi… ahahha), mettetene una all’ingresso non
invertente del comparatore finale, (vedete l’onda triangolare), una
sull’ingresso invertente dello stesso (vedete una bella linea dritta che
si sovrappone alla triangolare tagliandogli le punte a vari livelli) , e
la terza all’uscita del comparatore dove vedrete un’onda rettangolare il
cui duty cycle varia in funzione della posizione del cursore del
potenziometro.
Deviatore
nello stadio di uscita, che collegherete ai due ingressi del ponte ad H
precedente. La posizione di questo porterà in marcia avanti o marcia
indietro in maniera regolata rispetto alla velocità il vostro motore.
Manca la posizione di motore fermo che potrete ottenere o togliendo
alimentazione allo stadio oscillatore o togliendola allo stadio di
potenza, o semplicemente usando un deviatore a tre posizioni invece che a
due.
Buon assemblaggio, e credetemi, anche se io
in questo momento non posso montare un prototipo e farvelo vedere a voi
funzionerà.
Appendice di fine pagina.
Legge di Lenz: la forza contro elettromotrice indotta è pari a meno
la variazione del flusso dell’induzione concatenato nel tempo. Con il
termine “contro” si giustifica la presenza del segno negativo
nell’espressione della legge di Lenz che ha come conseguenza che qualunque
fenomeno di induzione tende ad opporsi alla causa che li ha innescati.
Impone inoltre e in maniera evidente che per rilevare la comparsa di una
f.e.m. il flusso non può essere costante ma obbligatoriamente variabile
nel tempo anche se con legge non necessariamente sinusoidale. La legge di
Lenz è alla base del funzionamento di ogni macchina elettrica, perfino
quelle di tipo statico (trasformatori) in cui non essendo parti in
movimento la variazione di flusso viene generata variando la tensione di
alimentazione, genere con legge sinusoidale, che comporta una corrente e
di conseguenza un flusso variabile con la stessa legge. Ecco perché un
trasformatore non può essere alimentato in continua. Verrebbe a mancare
l’accoppiamento magnetico tra primario e secondario.
Regola di shannon: affinchè un segnale campionato risulti
successivamente ricostruibile, non perda cioè troppa informazione nella
conversione da analogico a digitale, dovrà essere campionato (registrato,
memorizzato il valore) a una frequenza almeno doppia della fondamentale
rispetto alla sua anlisi armonica secondo Fourier.
Analisi di Fourier: semplificazione… un segnale periodico, per
quanto complesso, è sempre ottenibile come somma di infinite sinusoidi.
(in aggiunta possiamo dire che queste sinusoide si chiamano “armoniche” ma
non ci addentriamo oltre o rischiamo di uscire dal tema di questo
tutorial).
Grandezze stazionarie: Una grandezza si dice stazionaria quando in
funzione del tempo non ammette alcuna variazione. Gli accademici
direbbero che in ogni istante le derivate temporali di tensione e corrente
sono nulle. A noi è sufficiente la prima definizione considerando il fatto
che un utente grix potrebbe avere una grande passione per l’elettronica ed
essersi fermato alla terza media. Questo non lo deve escludere dalla
materia la quale semplicemente va rivisitata con termini più semplici. E’
fondamentale capire che “stazionario” è un vincolo più stretto che
“continuo”, e i due termini non sono sinonimi.
Grandezza continua: una grandezza (tensione o corrente) si dice
continua quando per quanto fluttui e sia instabile rispetto a un valore
nominale dato, non passa mai sotto la linea di zero. Il passaggio
sotto lo zero implica infatti una inversione del verso di deriva degli
elettroni divenendo così alternata.
Grandezza alternata: i fenomeni elettrici hanno origine dalla
presenza delle cariche elettriche negative dette elettroni. Questi
elettroni, spinti da opportune pompe (generatori di qualsiasi tipo)
possono derivare all’interno dei conduttori dando origini a flussi di
cariche (vedi glossario per flusso) che si muovono a velocità piuttosto
lenta detta appunto di deriva. Quando la “pompa” elettronica impone un
movimento di inversioni periodiche (ripetute regolarmente) o anche solo
sporadiche del flusso la grandezza (in questo caso corrente) si definisce
alternata. N.B. Alternata non significa necessariamente sinusoidale la
quale è invece una particolare forma di alternata.
Onda quadra: dicasi onda quadra una particolare forma di segnale
continuo (vedi grandezza continua) costituita da un tempo di permanenza
stazionaria (vedi sopra) alta pari al tempo stazionario basso. Ovviamente
si intende che il segnale si ripete uguale ne tempo per un tempo
indefinito, è cioè periodico. Dato che si definisce “Duty cycle” la
percentuale della parte alta rispetto alla parte bassa di un segnale
costruito come appena esposto, allora possiamo definire l’onda quadra come
quella particolare onda rettangolare caratterizzata da un duty cycle del
50%.
Relazioni magnetiche fondamentali: elenco delle leggi di base che
un elettronico dovrebbe conoscere anche se fortemente sconfinanti nel
campo dell’elettrotecnica:
cominciamo con le analogie magneto elettriche:
·
ß (riluttanza) = R (resistenza)
·
Φ (flusso) = I (corrente)
·
F.m.m. = V (tensione)
La f.m.m. si ottiene moltiplicando la corrente I per il numero delle
spire
f.m.m. = N* I
Ma la f.m.m. (tensione magnetica) si ricava anche moltiplicando il flusso
per la riluttanza, quindi
f.m.m. = Φ* ß
ne consegue che: Φ* ß
= N* I
equazione che risolta rispetto al flusso da: Φ = (N* I)/
ß che è la
legge di ohm magnetica.
Pagina precedente

.jpg)
{kind=link}