In questo esempio è mostrata la configurazione di un PID di temperatura con uscita sia analogica che PWM. L’input è acquisito a un ingresso analogico e simula la presenza del sensore PT100 finale.
In questa modalità il sistema è realizzabile in un laboratorio scolastico senza disporre della vasca e dei sensori PT100 e riscaldatore resistivo con relativa interfaccia.
L’impianto da controllare avrà questo aspetto, da utilizzarsi come sfondo della pagina del pannello HMI.
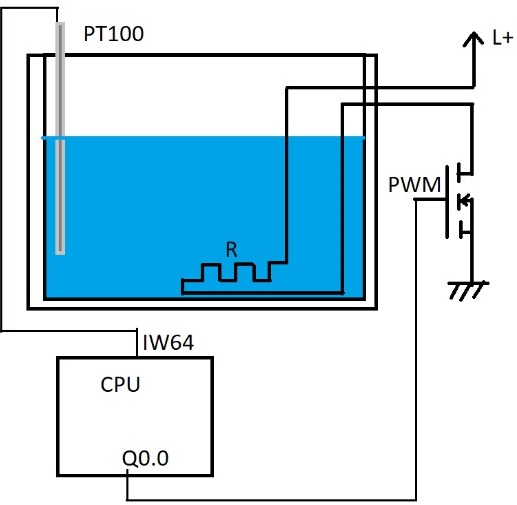
Il MOSFET schematizza un qualunque dispositivo statico in grado d dare una modulazione PWM al carico della termoresistenza.

Potremmo, in maniera più professionale, utilizzare un relè statico modello SSRL240DC25 in grado di trasmettere al carico fino a 25A con pilotaggio in continua tramite l’uscita a impulsi %Q0.0 del PLC.
Una volta messo in azione, porremo il setpoint dal campo dell’HMI ad esempio a 70°C.
E’ importante non eseguire la configurazione dell’uscita PWM anche a partire dalle proprietà della CPU perché si creerebbe un conflitto con il risultato che non si accende l’uscita fisica.
Attivando le funzioni di commissioning si possono tracciare le curve. Come possiamo notare c’è un inseguimento verso il valore impostato come setpoint.
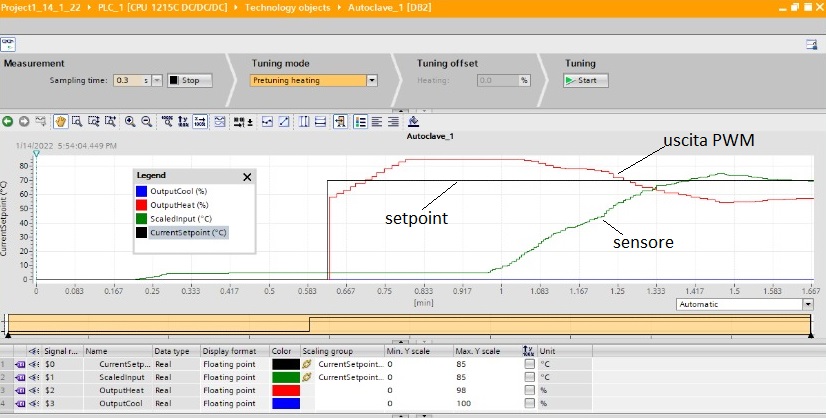
L’uscita PWM ha un duty cycle in diminuzione mano a mano che il sensore segnala che la temperatura si avvicina al setpoint. Verrà raggiunto un punto di mantenimento in cui il calore perso per convezione dalla superficie della vasca (quando non vi è un coperchio) viene compensato dal valore fornito dalla termo resistenza
Scarica Project1_14_1_22_PID
Secondo esempio: PID semplificato
Questo secondo esempio Attiva l’uscita a impulsi %Q0,0, alla quale, se collegato un relè statico potremmo modulare il calore prodotto da una termoresistenza.
Il video sarebbe uguale a quello mostrato sopra, quindi non si ripete.
Importante: Non attivare l’uscita a impulsi PWM dalle proprietà della CPU perché si creerebbe un conflitto e la modulazione resterebbe spenta.(la traccia rossa nella visualizzazione del tuning rimarrebbe a zero).
Se durante la sperimentazione, ad esempio nei laboratori scolastici, colleghiamo un relè all’uscita %Q0.0 sentiremo attivarsi e sganciare la bobina in maniera non uniforme perché dipenderà dalle correzioni introdotte in campo.
Per verificare il funzionamento è necessario avere collegato un potenziometro 0..10V all’ingresso analogico, ad esempio utilizzando l’interfaccia G-Tronc presentata nel sito e nei testi.
Durante il test: Attivare il tuning dal tasto start dell’apposito menù. Compariranno tre tracce, una nera, una verde e una rossa. Il setpoint associato alla traccia nera e introdotto da HMI (ad esempio 50°C) crea una linea continua costante. La traccia verde rappresenta l’ingresso “input per” ovvero periferica (da non confondere con percentuale) è associato alla manopola analogica che simula la sonda PT100.
La traccia rossa mostra l’ampiezza del PWM per la modulazione.
Se la traccia della PT100 (verde) fosse sopra a quella del set point, la traccia rossa di reazione dovrà stare a zero, in quanto nessun riscaldamento di reazione è necessario.
Ruotando la manopola che simula la PT100 la traccia rossa comincia ad alzarsi da 0 e più bassa sarà la temperatura letta in campo rispetto al setpoint maggiore sarà la rapidità e il valore puntuale della traccia rossa (ampiezza del duty cycle ovvero calore scaldante immesso).
Le tracce rossa e verde si dovranno incrociare nel punto che è funzione dei dati di parametrizzazione del nostro PID.
Contestualmente ai movimenti delle tracce rossa e verde, dovremmo udire il suono della commutazione del relè di controllo e vedersi accendere l’uscita fisica %Q0.0 che non presenterà una oscillazione di clock regolare, ma in funzione della distanza del valore letto in campo dal setpoint.
Scarica il programma PID completo -> Regolazione PID di temperatura
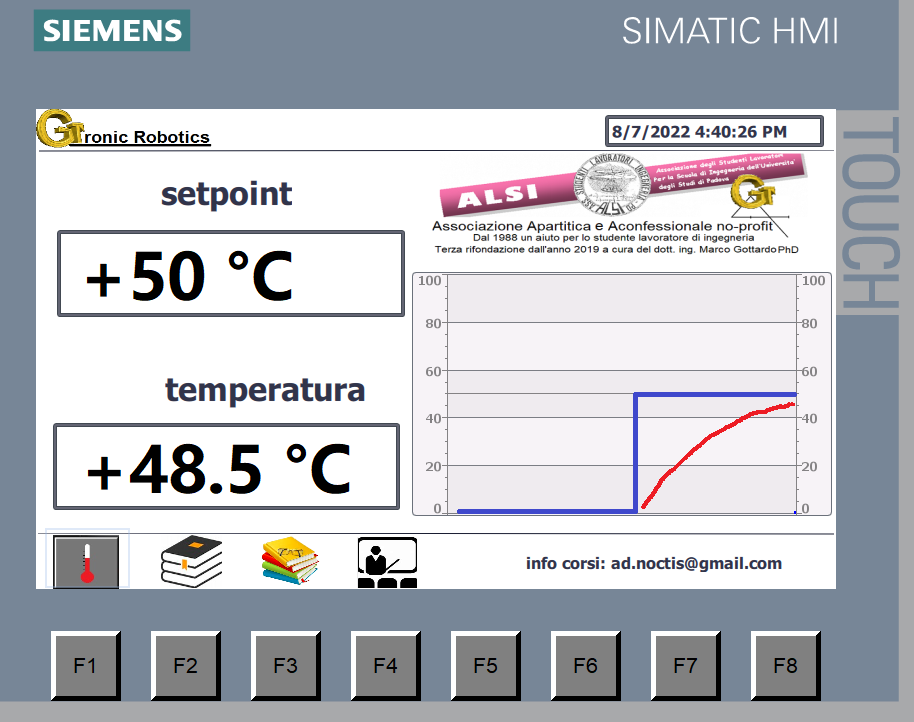
L’interfaccia HMI con il regolatore in funzione è questa, si nota l’inseguimento della temperatura al set point.
Non impostare il PWM sulle proprietà hardware della CPU.
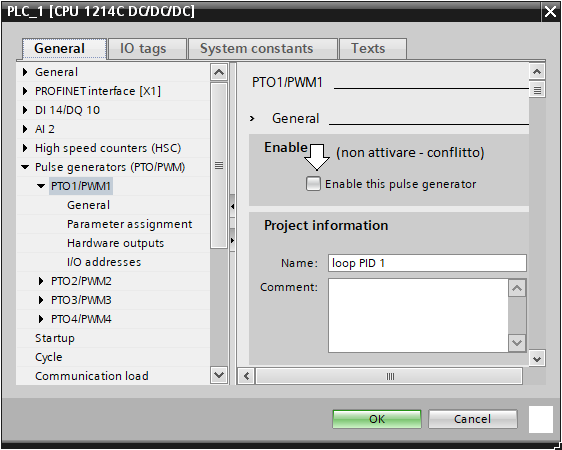
Nota importante: Non abilitare il PWM dalle proprietà della CPU, ovvero dove indicato con la freccia non bisogna mettere lo spunto. In caso contrario l’uscita di controllo fisica nella morsettiera non si abilità per la presenza di un conflitto.
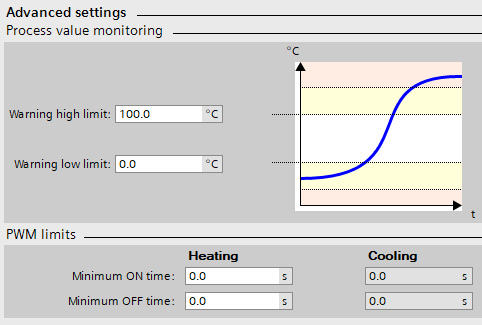
Il setpoint viene introdotto dall’operatore tramite il pannello HMI e indica il valore di temperatura che desideriamo stabilizzare nella nostra vasca. (valore atteso/richiesto).
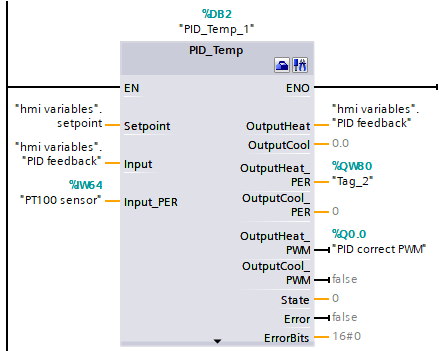
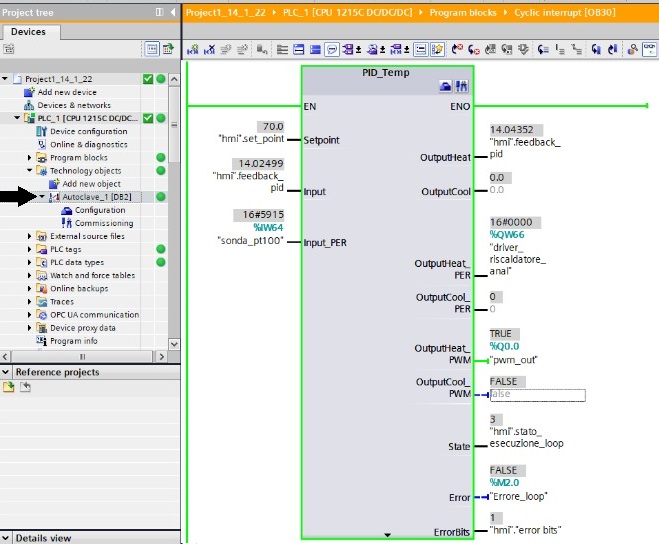
Preleviamo dal pannello di destra il comando PID_Temp, e come mostrato sopra abilitiamo l’uscita a impulsi su “OutputHeat_PWM” collegando il pin a %Q0.0.
Il Feedback, definita sul DB globale di tipo Real lo colleghiamo all’uscita OtputHeat per poi riportarlo all’ingresso indicato con Input, allo scopo di chiudere l’anello di regolazione.
Il sensore PT100, posto in campo, è acquisito all’ingresso di periferiche Input_PER, e indica l’attuale valore di temperatura della vasca. Iniettando calore muoveremo verso l’alto questa lettura.
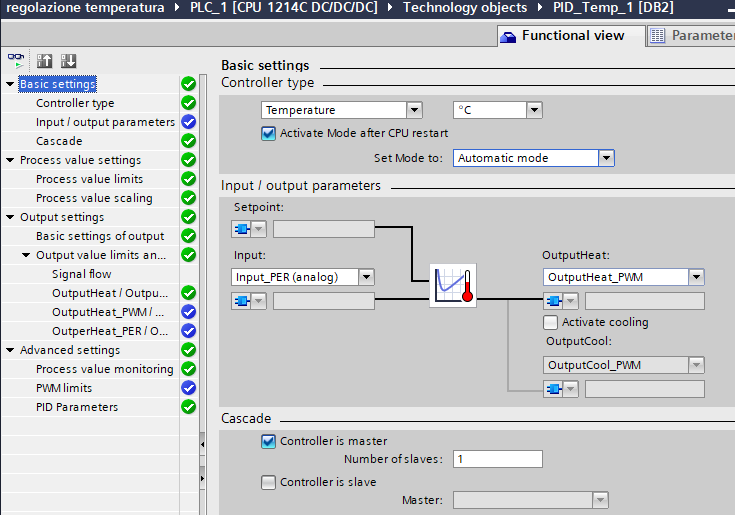
Sopra vediamo le prime voci di parametrizzazione che nel nostro caso devo indicare sorgente e destinazione del controllo ovvero il segnale analogico per la sonda in campo e il controllo PWM per il digitale che dovrà curare la correzione in funzione dell’errore presente ovvero la differenza tra il setpoint e il valore attuale.
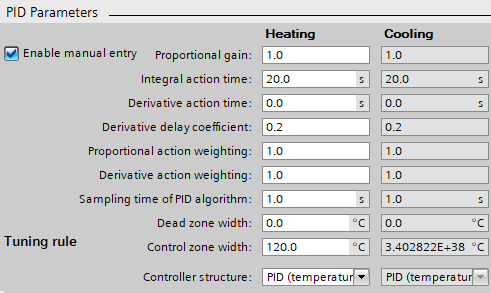
Nella configurazione finale, abilitiamo il “manual entry la cui ultima voce dovrà essere essere indicata compatibile con il processo in esame piuttosto che una non ben specificata molto alta saturazione, come visibile nella colonna di destra.
Bibliografia:
Le nozioni spiegate in questa pagina si trovano nei libri di testo:
Let’s program a PLC First step in TIA Portal V17 Esercitazioni guidate per istituti tecnici: Terza edizione 2022. ISBN: 979-8486336553
Oppure nel libro dedicato agli esercizi:
Let’s Program a PLC!!! 100 Esercizi di programmazione in TIA PORTAL V17 S7-1200/1500 WinCC Basic e Advanced per HMI: sesta edizione
sesta edizione 2022 ISBN: 979-8419107106